Как сделать своими руками дрон на Ардуино Уно
Дрон — очень дорогой гаджет. Как собрать квадрокоптер самому в домашних условиях? В этой инструкции я собираюсь рассказать, как сделать своими руками квадрокоптер по дешевке. Рама коптера и контроллер полета — самодельные. Конструкция сборки доступна даже для начинающих.
Рама состоит из алюминиевой антенны (штанги), лопасти вентилятора из алюминиевого плафона и дерева. Arduino UNO наряду с MPU6050 (гироскоп + Accle) используется в качестве контроллера полёта.
Шаг 1: Материалы
Показать еще 11 изображений
Это материалы, которые используются для моего дрона. Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Ссылки на Амазон:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.
 1v, лучше взять эту
1v, лучше взять эту - Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Макетная плата
- Коннетор XT60
- Передатчик и ресивер
- устройство для контроля напряжения Li-Po
 1v, лучше взять эту
1v, лучше взять этуСписок со ссылками на banggood:
- Передатчик и ресивер
- Бесщеточный двигатель
- 30 Amp ESC
- Li-Po батарейка
- Зарядное устройство Li-Po
- Контроллер напряжения Lipo
- Arduino uno
- MPU6050
- XT60 коннектор
- Пропеллер 1045
Ссылки на gearbest:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v
- Контроллер напряжения Lipo
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Коннетор XT60
- Вентильный двигатель CW
- Вентильный двигатель CCW
- 4*30Amp ESCs
- Пропеллер 1045
- Термоусадочная трубка
Шаг 2: Установка моторов
Когда вы покупаете моторы, крепление мотора и несколько винтов входят в комплект. Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Шаг 3: Делаем раму
Показать еще 3 изображения
Я использую старую алюминиевую антенну, мягкое дерево и алюминиевую пластину (лопасть вентилятора), чтобы сделать каркас. Отрежьте 4 куска алюминиевого бруска по 20см. Размер центральной пластины составляет около 11 * 18 см…. Деревянное крепление для двигателя имеет длину около 10 см и диаметр 4,5 см (там, где установлен двигатель).
Закрепите алюминиевые стержни с помощью центральной пластины с помощью винтов и вставьте крепление двигателя под алюминиевые стержни. Ваша рама готова (см. видео).
Шаг 4: Устанавливаем все компоненты (ESC и моторы на раму)
Показать еще 4 изображения
Теперь прикрепите моторы к деревянному креплению с помощью винтов и гаек (любых типов) и соедините с ними провод ESC (произвольно), зафиксируйте ESC с помощью изоленты или стяжек, в моем случае это изолента (дешевле, чем стяжки).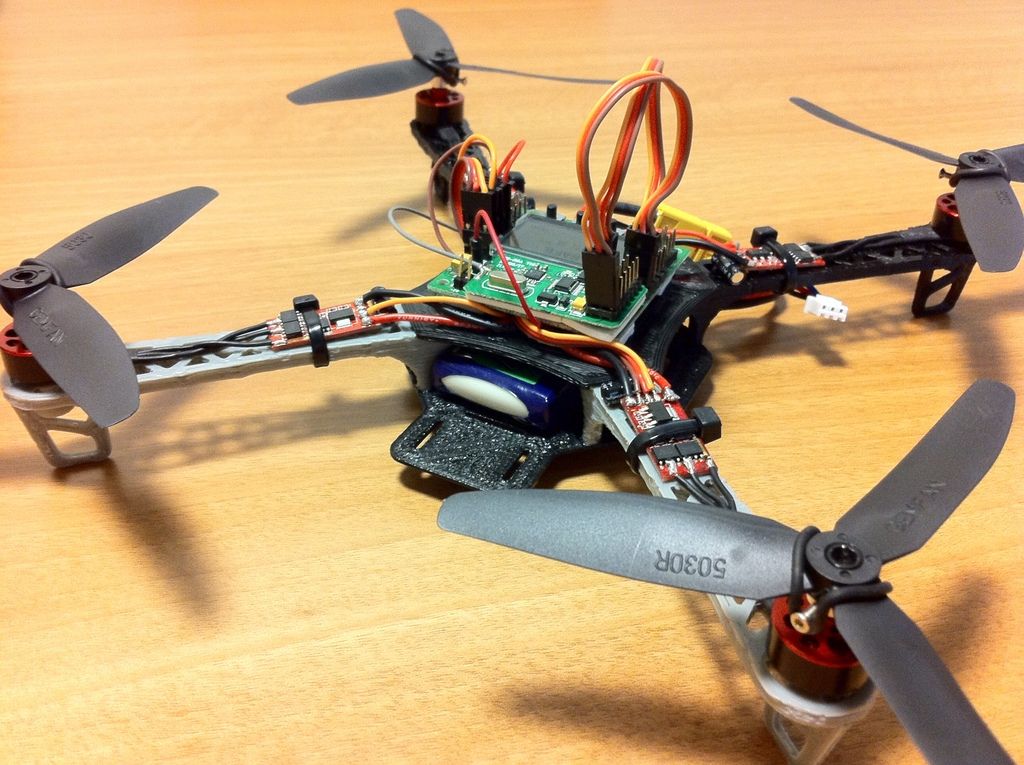 После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
Шаг 5: Контроллер полёта
Показать еще 4 изображения
На основе Ардуино Уно и MPU6050, создайте контроллер полёта.
Мой контроллер основан на Joop Brokking’s YMFC-AL и его автоуровневом квадрокоптере. Соедините все согласно диаграмме.
Шаг 6: Соединяем ESC и ресивер с контроллером полёта
*** Не соединяйте BEC-провод ESC (5 вольт), соединяйте лишь сигнальный провод
*** Запитывайте ресивер от 5вольтового источника Ардуино
Соединение ESC:
- Цифровой пин-4 к ESC1 (правый передний CCW)
- Цифровой пин-5 к ESC2 (правый задний CW)
- Цифровой пин-6 к ESC3 (левый задний CCW)
- Цифровой пин-7 к ESC4 (левый передний CW)
Соединение ресивера:
- Цифровой пин-8 к каналу 1 ресивера
- Цифровой пин-9 к каналу 2 ресивера
- Цифровой пин-10 к каналу 3 ресивера
- Цифровой пин-11 к каналу 4 ресивера
Шаг 7: Настройка контроллера полёта (загрузка скетча)
Показать еще 4 изображения
*** На этом этапе не подключайте лётную батарею
Теперь загрузите Arduino IDE и приложенный скетч и извлеките файл. Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Arduino IDE
Скетч контроллера полета
Сначала загрузите код и откройте последовательный монитор на 56000b и следуйте инструкциям в видео
Если ошибки не возникло, загрузите скетч калибровки ESC после загрузки кода. Поставьте передатчик на полную мощность и подключите летную батарею после нескольких звуковых сигналов, выключите дроссель (я думаю, что этот метод работает не для всех типов и марок ESC, но у меня это работает отлично).
После загрузки скетча калибровки ESC загрузите скетч контроллера полета и Ваш FC готов.
Файлы
- YMFC-AL.zip
Шаг 8: Установка электроники в кейс и монтаж
Показать еще 11 изображений
После завершения всех работ по соединению электрокомпонентов, положите всю электронику в коробку и завершите всю проводку. Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Самое сложное в создании этого квадрокоптера — настройка PID. Я сломал 2 пары пропеллеров и коробку с электроникой, пытаясь научиться летать на ней.
Как сделать Дрон своими руками
Мини дрон — квадрокоптер на дистанционном управлении можно очень просто сделать дома. Использовать его можно для игр и как макет для изучения работы дрона. Конструкция содержит минимальное количество деталей, а на постройку уйдет 15 минут времени или чуть более.
Наша простая модель не имеет ни регулировку скорости вращения двигателей, ни изменения направления полета. Она не умеет практически ничего, кроме того как подниматься в воздух вверх и опускаться по нажатию кнопки. Но если вы хотите, то вы можете в дальнейшем собрать более серьезный вариант и доработать всеми возможностями какими хотите.
Понадобится для сборки Дрона
- Пульт и приемник дистанционного управления.
- Аккумулятор плоский.
- Четыре двигателя.
- Четыре пропеллера.

А также: палочки от мороженного, пистолет с горячим клеем, паяльник с припоем и флюсом.
Подробнее о деталях для сборки квадрокоптера
Пульт с приемником для дистанционного управления можно позаимствовать из игрушки, к примеру из сломанной машинки или купить — Али Экспресс. Главным условием должно быть то, чтобы вся электроника исправно работала от напряжения 3,7 В.
Аккумуляторная батарея 3,7 В взята от старого мобильного телефона, ее так же можно приобрести — Али Экспресс. Там можно выбрать еще гораздо меньшие варианты.
Мини двигатели для летающих моделей можно купить — Али Экспресс.
Пропеллеры так же придется приобрести — Али Экспресс. Они должны подходить к двигателям. Так что лучше их взять вообще комплектом — тут на Али.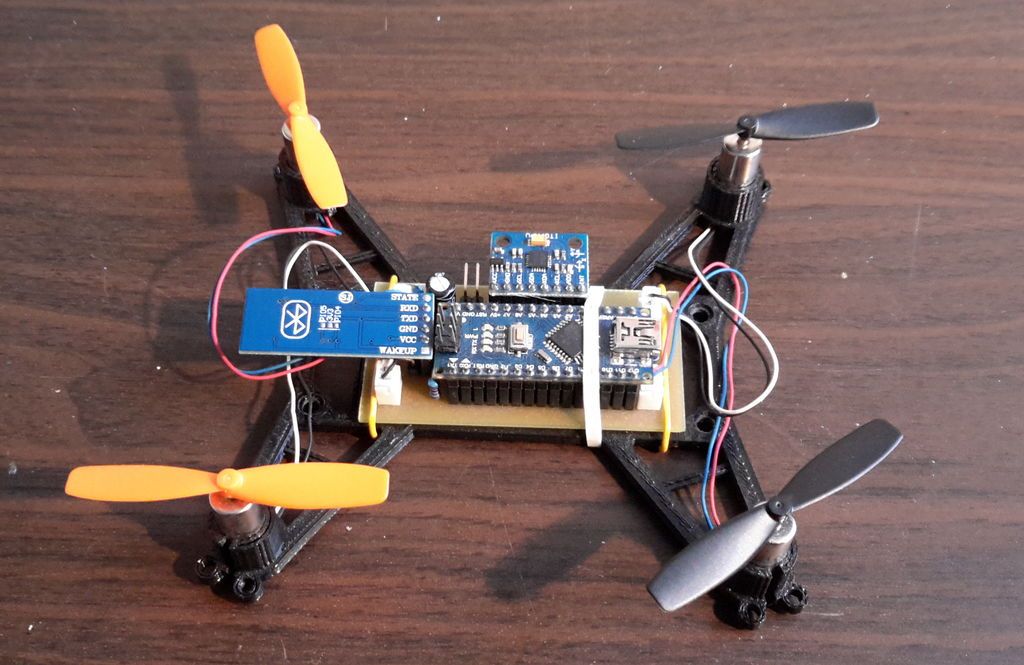
Изготовление Дрона — квадрокоптера
Итак, первым делом соберем такую решетку из четырех палочек для мороженного. Фиксируем все горячий клей. Это будет основная рама нашего мини квадрокоптера.
Аккумулятор приклеиваем таким же способом к раме.
Приклеиваем четыре двигателя с пропеллерами в углы решетки.
Теперь нужно сделать ножки, на которых будет стоять дрон. Разрежем две палочки от мороженного пополам.
Прикрепим к основанию.
Добавляем приемную плату ДУ. Вывода всех двигателей соединим параллельно.
Подключаем провода двигателей к выходу платы ДУ.
Подключаемся к аккумуляторной батареи.
Проверка. Удерживаем дрон от подъема и нажимаем на кнопку пульта ДУ. Если пропеллеры всех четырех двигателей закрутились — все работает исправно.
Если пропеллеры всех четырех двигателей закрутились — все работает исправно.
Выходим на открытую местность, ставим наш квадрокоптер и проверяем работу. Дрон должен взлететь в верх без особых проблем.
Если пропеллеры закрутились, а конструкция не взлетела, проверьте уровень заряда аккумулятора. Если все в норме, нужно облегчить конструкцию. В принципе, мощности таких четырех мотором должно хватить с запасом.
Во время постройки рекомендую как можно больше экономить общий вес, чтобы дрон был максимально легок. Так что лейте меньше клея, отрезайте максимально короткие провода и т.п.
Смотрите видео
Более подробную инструкцию по сборке игрушки смотрите в видео.
Сборка дешевого самодельного дрона
Первоначально опубликовано 24 марта 2019 г.
Самодельный мини-дрон
Содержание
- Обзор
- Компоненты самодельного дрона
- Собираем дрон своими руками
- Резюме
- Связанные статьи
Обзор
Если вы новичок и хотите управлять небольшим прочным дроном в качестве хобби, то эта инструкция для вас! Теперь вы можете собрать свой мини-квадрокоптер своими руками с нуля, и он не просверлит дыру в вашем кармане. Вам больше не нужно покупать дорогие дроны, так как этот дрон не будет стоить вам больше 20 долларов . Вы можете наслаждаться полетом мини-дрона, который весит менее 100 грамм . Итак, давайте посмотрим, что нам нужно для сборки этого дрона.
Вам больше не нужно покупать дорогие дроны, так как этот дрон не будет стоить вам больше 20 долларов . Вы можете наслаждаться полетом мини-дрона, который весит менее 100 грамм . Итак, давайте посмотрим, что нам нужно для сборки этого дрона.
- 4 миниатюрных двигателя: их можно найти в магазине электроники для хобби; выбрать двигатель мощностью 400-500 кВ
Миниатюрные двигатели
2. 4 кожуха двигателя: используются для удержания двигателей на месте
кожуха двигателя
3. 4 Пропеллера: желательно диаметром 10 см; при покупке убедитесь, что пропеллеры плотно прилегают к ротору мотора
Мини-пропеллеры
4. Литий-полимерный аккумулятор. Аккумулятора на 3,7 В с номиналом 300–500 мА·ч и температурой 25 °С будет достаточно для полета продолжительностью 10–15 минут.
Литий-полимерный аккумулятор
5. Зарядное устройство: зарядное устройство на 3,7 В; вы можете купить его с батареей
6. Пара передатчик-приемник 2,4 ГГц: я использовал плату HY-JJh46; вы можете найти множество таких контроллеров полета в Интернете. Если у вас нет подходящих деталей, вы можете приобрести плату контроллера полета и пульт дистанционного управления (радиопередатчик) для управления дроном. Контроллер полета позволяет вам управлять дроном разными способами, и мы познакомим вас с тем, как это сделать, во второй части, используя Arduino в качестве контроллера полета.
Пара передатчик-приемник 2,4 ГГц: я использовал плату HY-JJh46; вы можете найти множество таких контроллеров полета в Интернете. Если у вас нет подходящих деталей, вы можете приобрести плату контроллера полета и пульт дистанционного управления (радиопередатчик) для управления дроном. Контроллер полета позволяет вам управлять дроном разными способами, и мы познакомим вас с тем, как это сделать, во второй части, используя Arduino в качестве контроллера полета.
Передатчик-приемник контроллера полета
7. 2 тюбика с чернилами для шариковых ручек: для изготовления лопастей квадрокоптера
тюбики с чернилами для шариковых ручек для изготовления лопастей пропеллеров
8. Материал Thermocol: для крепления схемы
9. Лента/термоклей
Сборка самодельного дронаШаг 1
Выньте миниатюрные двигатели и установите их в корпуса. Кроме того, возьмите четыре пропеллера и установите по одному на каждый мотор. Убедитесь, что пропеллеры плотно прилегают к ротору двигателя, чтобы избежать каких-либо сбоев на более позднем этапе.
Убедитесь, что пропеллеры плотно прилегают к ротору двигателя, чтобы избежать каких-либо сбоев на более позднем этапе.
Подключить двигатели
Шаг 2
Извлеките плату приемника HY-JJh46-RX и подключите четыре двигателя, как показано на принципиальной схеме. Плата, показанная на схемах, отличается от Fritzing, поэтому выполните соединения следующим образом:
- Двигатель RF (правый передний)
- Положительный провод (двигатель) -> вывод RF+ (плата RX)
- Минусовой провод (двигатель) -> контакт RF (плата RX)
- Двигатель LF (левый передний)
- Положительный провод (двигатель) -> контакт LF+ (плата RX)
- Минусовой провод (двигатель) -> контакт LF (плата RX)
- Двигатель LB (слева сзади)
- Положительный провод (двигатель) -> контакт LF+ (плата RX)
- Минусовой провод (двигатель) -> контакт LB (плата RX)
- Двигатель RB (правый задний)
- Положительный провод (двигатель) -> вывод RF+ (плата RX)
- Минусовой провод (двигатель) -> контакт RB (плата RX)
Принципиальная схема подключения двигателей
Шаг 3
Извлеките литий-полимерный аккумулятор (в моем случае 380 мАч, 25C, 3,7 В) и подключите его к плате следующим образом: )
Шаг 4
Возьмите кусок термокола и вырежьте из него кубик размером 5 см x 5 см x 5 см.
Материал Thermocol
Шаг 5
Возьмите две шариковые ручки и извлеките из них чернильные трубки. Теперь пропустите его через термокол-куб таким образом, чтобы чернильная трубка проходила точно через среднюю точку квадрата.
Пропустить чернильные трубки через термокол-куб
Шаг 6
Подсоедините двигатели на обоих концах двух чернильных трубок и затяните винты. Используйте горячий клей/ленту, чтобы закрепить чернильные трубки на месте.
Используйте клей, чтобы соединить моторы на чернильных трубках
Используйте клей для соединения двигателей на каждом конце трубки для чернил
Прикрепите батарею и плату приемника к кубу
Шаг 7
Поместите аккумулятор на верхнюю часть термокуба и поместите на него плату RX. Закрепите сборку с помощью скотча/горячего клея. Вот так! Ваш дрон готов к взлету. Включите кнопку питания в верхней части полетного контроллера и начните веселье.
Помните, что вращающиеся пропеллеры дрона чрезвычайно опасны и могут привести к серьезным травмам. Всегда управляйте дроном в открытом месте и избегайте летать близко к людям.
Этим маленьким самодельным дроном очень сложно управлять, поэтому будьте особенно осторожны при управлении им. В следующей статье мы собираемся использовать более устойчивую раму для дрона и использовать Arduino в качестве контроллера полета.
Узнайте больше руководств, чтобы отточить свои навыки работы с дроном с помощью Arduino:
- Как собрать дрон своими руками с нуля. Часть 2. Использование Arduino Nano в качестве контроллера полета
- Как собрать дрон своими руками с нуля. Часть 3. Создание дрона с функцией GPS Follow-Me
- Топ 5 самодельных взломов дронов с использованием Arduino
- Четыре хобби-квеста с дронами, которые вы можете выполнить из дома прямо сейчас
- Знакомство с микродронами для поклонников Maker
Посетите нас в социальных сетях
diydrones
 youtube.com/embed/WnHK_x_a17g?start=15″ frameborder=»0″ allowfullscreen=»»>
youtube.com/embed/WnHK_x_a17g?start=15″ frameborder=»0″ allowfullscreen=»»> Добро пожаловать в крупнейшее сообщество любителей беспилотных летательных аппаратов!
Это сообщество является родиной ArduPilot, первой в мире универсальной платформы автопилота (самолеты, мультикоптеры всех видов и вездеходы). Сегодня автопилот Pixhawk работает с множеством мощных бесплатных и открытых программных систем БПЛА, в том числе:
- PX4 , профессиональный коптер, самолет, вездеход и программный стек вертикального взлета и посадки из проекта Dronecode Project Linux Foundation.
- ArduCopter , программное обеспечение для мультикоптера и вертолетного БПЛА с открытым исходным кодом
- ArduPlane , программное обеспечение с открытым исходным кодом для самолетов всех типов
- ArduRover , программное обеспечение с открытым исходным кодом для наземных транспортных средств
Узнайте, как автономные дроны и искусственный интеллект меняют горнодобывающую промышленность, повышая эффективность, безопасность и точность.
Последнее обновление
13 марта 2023 г.…
Читать далее…Комментариев: 0
Метки: добыча полезных ископаемых, автономия, дрон, ай
Преимущества использования лопастей с переменным шагом по сравнению с фиксированным шагом:
1. Диапазон скоростей полета самолета больше по сравнению с лопастями с фиксированным шагом.
2. Самолет может быть настроен на более высокие показатели энергоэффективности при соответствующей скорости полета в более широком диапазоне скоростей полета
одно исследование показало, что конструкция винта с изменяемым шагом может увеличить максимальную взлетную массу самолета и повысить энергоэффективность в режиме висения, особенно если нагрузка варьируется для разных миссий.
 …..
…..Для получения дополнительной информации перейдите на страницу T-MOTOR’S Linkedin, статья : …
Подробнее…Комментариев: 0
Теги:
TF-Luna может использоваться с PixHawk1 для предотвращения препятствий и удержания высоты. Но поскольку это датчик ближнего действия, в большинстве случаев он используется для обхода препятствий.
- TF -Настройки Луны :
- Примечание. Если при использовании LiDAR в качестве датчика обхода препятствий возникают всплески, рекомендуется изменить частоту кадров на 250 Гц, см. подробности команды с идентификатором команды 0x03 в руководстве и для удобства настройте другие параметры ( например, установка частоты кадров, изменение адреса и т. д.) в режиме UART рекомендуется, если у вас нет преобразователя IIC-USB. Простой адаптер или плата UART-USB должны работать.
 Простой адаптер или плата UART-USB должны работать.
Простой адаптер или плата UART-USB должны работать.На момент написания этого документа последняя прошивка была 3.3.0. Для обновления прошивки обратитесь в нашу службу технической поддержки.
Связь TF-Luna по умолчанию — UART. LiDAR поставляется с одним кабелем. Чтобы использовать IIC, кабель нуждается в небольшой модификации, подробности будут упомянуты в следующем…
Читать далее…Комментариев: 0
Теги:
9Стандартная версия 0002 TF03 поставляется с интерфейсом CAN и может быть сопряжена с CAN-портом PixHawk1 или любым полетным контроллером, на котором установлена прошивка Ardupilot и имеется интерфейс CAN. Поддержка протокола CAN была добавлена в прошивки Ardupilot, начиная с Copter 4.2.0, для предотвращения препятствий и удержания высоты.
- 1. TF 03- CAN Настройки :
Следует отметить, что TF03 имеет две разные аппаратные версии для 485/RS232 и UART/CAN. Поэтому при покупке LiDAR обратите внимание на покупку LiDAR с интерфейсом CAN (стандартная версия). Несколько LiDAR могут быть подключены к одной CAN-шине. Нам нужно назначить разные идентификаторы CAN для каждого LiDAR точно так же, как мы делаем для связи IIC. Скорость передачи данных каждого LiDAR должна быть установлена одинаковой…
Читать далее…Комментариев: 0
Теги:
Мы рады представить комплект для промышленных миссий с Pixy SM. Новый расширенный комплект Pixy SM может повысить стабильность камеры в воздухе, уменьшить резонансную вибрацию, что позволяет получить более качественные изображения и видео, и хорошо подходит для осмотра таких конструкций, как здания, ветряные мельницы, мосты и т. д.
д.
Новое демпфирование также может безупречно работать для миссий по картированию, что означает, что систему можно использовать в режиме проверки и картирования без изменения других.
💬Свяжитесь с нами по адресу [email protected] для дальнейшего обсуждения.
🌏PIXY SM — РАСШИРЕННЫЙ КОМПЛЕКТ ДЛЯ ПРОМЫШЛЕННЫХ…
Комментариев: 0
Теги:
Примечание. Этот документ применим к полетным контроллерам Cube Orange и Cube Black. Доступный интерфейс IIC, который можно использовать для подключения нескольких TF-Luna, одинаков на обоих полетных контроллерах. TF-Luna можно использовать с PixHawk Cube для предотвращения препятствий и удержания высоты. Но поскольку это датчик ближнего действия, в большинстве случаев он используется для обхода препятствий.
- TF -Настройки Луны :
Примечание. Если при использовании LiDAR в качестве датчика обхода препятствий возникают какие-либо всплески, рекомендуется изменить частоту кадров на 250 Гц, см. сведения о команде с идентификатором команды 0x03 в руководстве и для удобства настройки других параметры (например, установка частоты кадров, изменение адреса и т. д.) в режиме UART рекомендуется, если у вас нет преобразователя IIC-USB. Простой адаптер или плата UART-USB должны работать.
На момент написания этого документа последняя прошивка была 3.3.0. Для обновления прошивки, пожалуйста…
Читать далее…Комментариев: 0
Метки: прошивка ардупилот, тф-луна, пиксхок куб
Загрузка. ..
..
Система пользовательской виртуальной базовой станции (VRS)
Существует ли служба, которая предлагает функциональные возможности для регистрации баз RTK и NTRIP Casters, а также через точку монтирования, получения местоположения дрона и возврата RTCM с виртуальной базы? Я заинтересован в получении этого решения или разработке его самостоятельно. Если…
Узнать больше
Вивек Двиведи опубликовал сообщение в блогеКак автономные дроны революционизируют горнодобывающую промышленность
Как автономные дроны и ИИ революционизируют горнодобывающую промышленность: достижения и влияниеУзнайте, как автономные дроны и ИИ меняют горнодобывающую промышленность за счет повышения эффективности, безопасности и точности. Узнайте о новейших технологиях…
Узнайте о новейших технологиях…
Узнать больше
Джессика Ма опубликовала пост в блогеВам интересно, как пропеллер повлиял на ваш дрон?
Преимущества использования переменного шага по сравнению с фиксированным шагом:1. Диапазон скоростей полета самолета больше по сравнению с лопастями фиксированного шага.2. Самолет может быть настроен на более высокие показатели энергоэффективности в соответствующем полете…
Узнать больше
Мэтью ДеКанио опубликовал обсуждениеУслуги обучения Pix4D
Здравствуйте, я новичок в области фотограмметрии и картографирования и пытаюсь выбрать программное обеспечение для картографирования. Одним из приложений, которые я рассматриваю, является PIX4D, и стоит ли записываться на курсы обучения и сертификации компаний.…
Одним из приложений, которые я рассматриваю, является PIX4D, и стоит ли записываться на курсы обучения и сертификации компаний.…
Узнать больше
Гремси обновил фото профиля Более…Загрузка…
«Потому что 10 000 долларов 5 000 долларов 1 000 долларов — это слишком много для автопилота, особенно если он не делает именно то, что вам нужно».
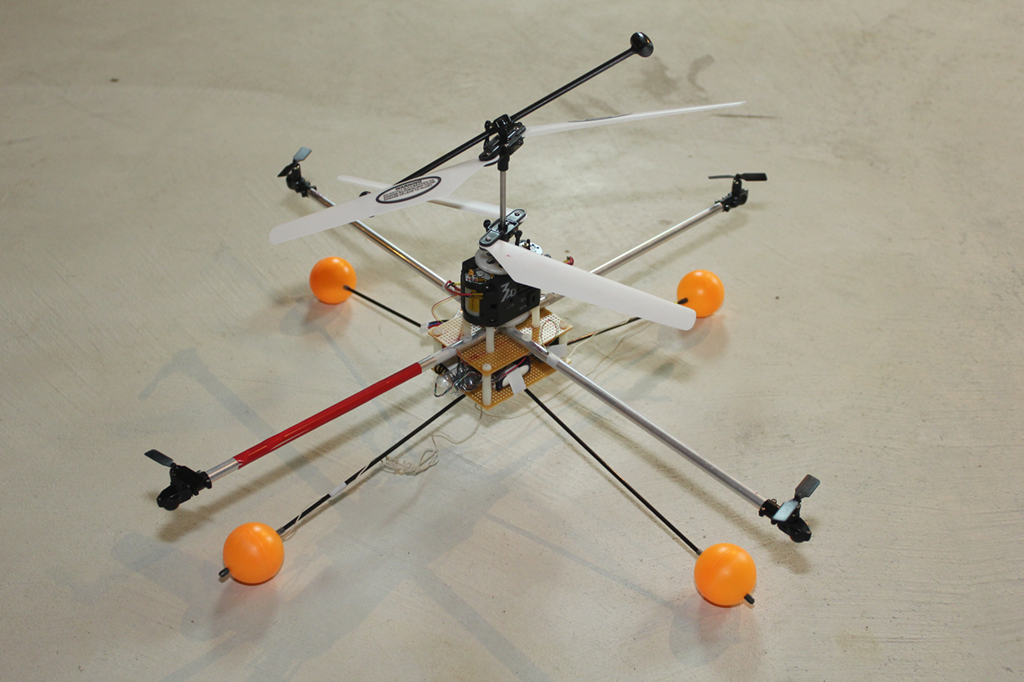
Беспилотный летательный аппарат (БПЛА, в просторечии известный как «дрон») — это, по сути, воздушный робот. В нашем понимании он способен как к дистанционно управляемому полету (как обычный радиоуправляемый самолет), так и к полностью автономному полету, управляемому датчиками, GPS и бортовыми компьютерами, выполняющими функции автопилота. Наши БПЛА включают самолеты, вертолеты, квадрокоптеры и дирижабли. Большинство из них весят менее пяти фунтов, а некоторые из них (особенно дирижабли) можно использовать в помещении.
Наши БПЛА включают самолеты, вертолеты, квадрокоптеры и дирижабли. Большинство из них весят менее пяти фунтов, а некоторые из них (особенно дирижабли) можно использовать в помещении.
Мы ориентируемся на некоммерческие («развлекательные») проекты любителей, хотя профессионалы тоже всегда приветствуются. Причины для создания собственного БПЛА варьируются от забавных технических задач, студенческих конкурсов, аэрофотосъемки и картографирования (то, что мы называем «GeoCrawling») до научных исследований. Нас в первую очередь интересует гражданское, а не военное применение БЛА здесь.
Если вы не знакомы со всем этим, начните здесь.
DIY Drones — это сообщество, основанное на платформе социальной сети Ning, и любой, кто зарегистрируется (это бесплатно и просто), может публиковать свои собственные записи в блоге, подобные этой, на главной странице, а также начинать обсуждения на боковой панели слева или загрузка видео ниже этого. Ваша регистрация дает вам возможность делать многое на сайте, поэтому не стесняйтесь публиковать все, что, по вашему мнению, будет интересно этому сообществу!
Существуют и другие любительские сайты, от дискуссионных форумов RC Groups до отдельных блогов, но DIY Drones явно создан как социальная сеть, а это означает, что сообщество так же важно, как и контент. Мы также сосредоточены на наиболее доступной части мира любительских БПЛА с целью возможного охвата учащихся старших классов.
Мы также сосредоточены на наиболее доступной части мира любительских БПЛА с целью возможного охвата учащихся старших классов.
Это означает, что мы уделяем особое внимание проектам любительских БПЛА, которые:
- Простой : Целью этого проекта является создание новых платформ любительских БПЛА, в том числе тех, которые можно было бы использовать для соревнований типа FIRST, подходящих для учащихся. Пока мы этим занимаемся, мы упростим разработку любительских БПЛА для всех.
- Дешевые : Целевая стоимость всех наших платформ составляет менее 1000 долларов США. Вы можете купить очень хорошую систему автопилота за 10 000 долларов, но это не наш подход. Чем дешевле, тем лучше, особенно со студентами и школами.
- Safe : Мы следуем текущей интерпретации рекомендаций FAA по малым БПЛА. Рекреационное использование (некоммерческое), высота до 400 футов, прямая видимость, «пилот в петле» и бортовые системы безопасности, которые всегда допускают ручное управление в случае неисправности. Мы создаем экспериментальные платформы, демонстрирующие автономию и способность выполнять по-настоящему полезную работу БПЛА, но мы тестируем их в контролируемых условиях. Если вы хотите пролететь несколько миль вне поля зрения или нанести на карту города, мы предполагаем, что у вас есть надлежащее разрешение FAA, или мы не хотим знать об этом.
- Совместное участие : Поделитесь, и другие поделятся с вами. Это означает, что, когда это возможно, мы открываем исходный код и публикуем его в Интернете. Все на этом сайте публикуется под лицензией Creative Commons на «атрибуцию», что означает, что любой может использовать или публиковать его, если он отдает должное первоначальному автору .
- Гражданский : Это сайт сообщества единомышленников, помогающих друг другу. Плохое поведение, от грубости до нецензурной брани, будет удаляться. Щедрость и доброта часто вознаграждаются ответным поведением и помощью.
 Мы создаем экспериментальные платформы, демонстрирующие автономию и способность выполнять по-настоящему полезную работу БПЛА, но мы тестируем их в контролируемых условиях. Если вы хотите пролететь несколько миль вне поля зрения или нанести на карту города, мы предполагаем, что у вас есть надлежащее разрешение FAA, или мы не хотим знать об этом.
Мы создаем экспериментальные платформы, демонстрирующие автономию и способность выполнять по-настоящему полезную работу БПЛА, но мы тестируем их в контролируемых условиях. Если вы хотите пролететь несколько миль вне поля зрения или нанести на карту города, мы предполагаем, что у вас есть надлежащее разрешение FAA, или мы не хотим знать об этом.Вот полный набор правил сайта:
- Вежливость превыше всего . Относитесь к другим с уважением, добротой и великодушием. Некоторые из наших самых опытных участников — это люди, которые когда-то были полными n00bz, но им помогали и поощряли другие, и теперь они отплачивают за услугу следующим поколением. Помните о золотом правиле. Никому не хамить , будь то другие участники, модераторы или владельцы. Это не общественный парк, и у вас нет конституционного права на свободу слова. Если вы создаете враждебную или неприятную среду, вы будете предупреждены, а если это продолжится, вы будете заблокированы.
- Не обсуждать политику и религию . Здесь не место для обсуждения ваших взглядов на целесообразность военного использования БПЛА, внешней политики любой страны, вашего отношения к войне или чего-либо еще, что может превратиться в политические дебаты. По нашему опыту, правила хорошей беседы на званом ужине — никаких дискуссий о политике и религии — применимы и к интернет-сообществам. Самодельные дроны стремятся объединить людей, и мы обнаружили, что дискуссии о политике и религии, как правило, поляризуют и разъединяют людей. Есть много других мест для обсуждения этих тем в Интернете, но не здесь.
- Задавайте вопросы в дискуссионном форуме; сообщить другим в сообщениях блога . Отправленные сообщения в блоге, которые представляют собой просто вопросы и должны были быть размещены на дискуссионном форуме, не будут одобрены. Модераторы могут или не могут отправить вам сообщение с текстом, чтобы вы могли сделать репост в нужном месте. Чтобы не потерять пост, поместите его в нужное место с самого начала.
- Сообщения в блогах предназначены для информационных тем, представляющих широкий интерес для сообщества . Они должны начинаться с изображения или видео, чтобы изображение появлялось на первой странице сайта и давало представление о теме, а также побуждало людей щелкнуть, чтобы узнать больше. Видео должны быть встроены (вставьте код для встраивания на вкладке HTML, а не на вкладке Rich Text). Пост также должен содержать ссылки, где это уместно. Не заставляйте людей искать в Google то, о чем вы говорите, если вы можете предоставить ссылку.
- Дискуссионный форум для вопросов и техподдержки . Мы предпочитаем оказывать всю техническую поддержку публично, чтобы другие могли следовать за нами. Если у вас есть проблема, пожалуйста, полностью опишите вашу конкретную настройку системы, в идеале с фотографией, и выберите правильные теги форума, чтобы другие могли найти тему позже.
- Не обсуждается военное или боевое применение БПЛА . Этот сайт как раз о любительском и гражданском использовании.
- Не допускается обсуждение незаконного или вредоносного использования БПЛА . Ответственное использование БПЛА лежит в основе нашей миссии. Это означает соблюдение всех законов в Соединенных Штатах, где находится этот сайт, и настаивать на том, чтобы наши участники в других странах соблюдали законы своих стран. Кроме того, мы считаем, что часть нашей ответственности заключается в том, чтобы помочь соответствующим органам понять, что возможно с любительскими БПЛА, чтобы они могли разрабатывать более информированные политики и законы. Поэтому мы призвали все соответствующие регулирующие органы, оборонные и правоохранительные органы стать здесь членами и даже принять участие, чтобы помочь им в этом, и многие из них так и сделали. Кроме того, если мы увидим какое-либо обсуждение использования БПЛА, которое, по нашему мнению, является потенциально незаконным или направленным на причинение вреда, мы сообщим об этом соответствующим органам и выполним любой юридический запрос, который они сделают для получения информации о пользователях (хотя мы не знаем многого из того, что не является общедоступным; см. следующий пункт).
- Продвижение безопасных полетов . Модераторы могут удалять публикации, которые они считают небезопасными, или пропагандировать небезопасные действия. Это суждение, так как также полезно проводить публичное обсуждение того, почему определенные действия небезопасны, но решение о том, оставить ли сообщение или отредактировать/удалить его, остается на усмотрение модераторов.
- Ваша конфиденциальность защищена до уровня : Это социальная сеть, поэтому все, что вы пишете и публикуете здесь, является общедоступным, за некоторыми исключениями: 1) Ваши личные сообщения являются частными. Администраторы не могут их видеть, как и никто другой, кроме получателя. Участники не должны публиковать личные сообщения без явного разрешения всех участников. 2) Ваш IP-адрес является частным. Мы размещены на Ning, который контролирует журналы сервера. Администраторы DIY Drones могут видеть только ваше имя пользователя и адрес электронной почты; они не видят ваш пароль и не имеют доступа к вашей учетной записи.
- D o не публиковать личные электронные письма или личные сообщения без разрешения . Это нарушение предполагаемой конфиденциальности (поэтому они и называются «личными сообщениями») и является основанием для бана.
- Не вводите ЗАГЛАВНЫМИ БУКВАМИ . Это считается КРИКОМ. Сообщения в шапке будут удаляться модераторами.
- Абсолютно никаких личных нападок . Это нормально не соглашаться, но никогда нельзя критиковать другого члена лично.
- Поделиться . Хотя мы не ограничены проектами с открытым исходным кодом, те, которые, как правило, получают наибольшее участие, как правило, имеют открытый исходный код.
 Относитесь к другим с уважением, добротой и великодушием. Некоторые из наших самых опытных участников — это люди, которые когда-то были полными n00bz, но им помогали и поощряли другие, и теперь они отплачивают за услугу следующим поколением. Помните о золотом правиле. Никому не хамить , будь то другие участники, модераторы или владельцы. Это не общественный парк, и у вас нет конституционного права на свободу слова. Если вы создаете враждебную или неприятную среду, вы будете предупреждены, а если это продолжится, вы будете заблокированы.
Относитесь к другим с уважением, добротой и великодушием. Некоторые из наших самых опытных участников — это люди, которые когда-то были полными n00bz, но им помогали и поощряли другие, и теперь они отплачивают за услугу следующим поколением. Помните о золотом правиле. Никому не хамить , будь то другие участники, модераторы или владельцы. Это не общественный парк, и у вас нет конституционного права на свободу слова. Если вы создаете враждебную или неприятную среду, вы будете предупреждены, а если это продолжится, вы будете заблокированы. Есть много других мест для обсуждения этих тем в Интернете, но не здесь.
Есть много других мест для обсуждения этих тем в Интернете, но не здесь.
 Поэтому мы призвали все соответствующие регулирующие органы, оборонные и правоохранительные органы стать здесь членами и даже принять участие, чтобы помочь им в этом, и многие из них так и сделали. Кроме того, если мы увидим какое-либо обсуждение использования БПЛА, которое, по нашему мнению, является потенциально незаконным или направленным на причинение вреда, мы сообщим об этом соответствующим органам и выполним любой юридический запрос, который они сделают для получения информации о пользователях (хотя мы не знаем многого из того, что не является общедоступным; см. следующий пункт).
Поэтому мы призвали все соответствующие регулирующие органы, оборонные и правоохранительные органы стать здесь членами и даже принять участие, чтобы помочь им в этом, и многие из них так и сделали. Кроме того, если мы увидим какое-либо обсуждение использования БПЛА, которое, по нашему мнению, является потенциально незаконным или направленным на причинение вреда, мы сообщим об этом соответствующим органам и выполним любой юридический запрос, который они сделают для получения информации о пользователях (хотя мы не знаем многого из того, что не является общедоступным; см. следующий пункт). Администраторы не могут их видеть, как и никто другой, кроме получателя. Участники не должны публиковать личные сообщения без явного разрешения всех участников. 2) Ваш IP-адрес является частным. Мы размещены на Ning, который контролирует журналы сервера. Администраторы DIY Drones могут видеть только ваше имя пользователя и адрес электронной почты; они не видят ваш пароль и не имеют доступа к вашей учетной записи.
Администраторы не могут их видеть, как и никто другой, кроме получателя. Участники не должны публиковать личные сообщения без явного разрешения всех участников. 2) Ваш IP-адрес является частным. Мы размещены на Ning, который контролирует журналы сервера. Администраторы DIY Drones могут видеть только ваше имя пользователя и адрес электронной почты; они не видят ваш пароль и не имеют доступа к вашей учетной записи.