Квадрокоптер своими руками: Часть I / Хабр
ВНИМАНИЕ, статья устарела, но её всё еще можно использовать в ознакомительных целях
Как и обещал, как только полечу — напишу полноценный пост по поводу сборки своего летающего агрегата. Наверняка многие давно посмотрели как «обычный» офисный сотрудник собирает это за 2 часа, сразу отмечу что я не «обычный» офисный работник, поэтому летчик из меня пока не очень, но важно что квадрокоптер летает и адекватно реагирует на управление. Первое и самое главное — если решили собирать, не экономьте и не думайте что вы умнее тех кто уже летает, так же учтите, что теория несколько расходится с практикой.
Есть большое число прошивок, готовых контроллеров, вариантов датчиков, моторов и т.д. и т.п. — выбрать есть из чего, но в статье остановлюсь только на одном варианте, основанном на Arduino Mega, прошивке MegaPirate и относительно дешевых датчиках.
Результат
Чтобы не мучить тебя, %username%, вот так оно летает без особых настроек, калибровок и балансировок в неумелых руках:
А теперь что же нам потребуется для этого…
Детали и цены
Самое важное и минимальное что потребуется для сборки с нуля (первым в списке идет то, что использовал я, затем то что используют многие другие):
| Сам квадрокоптер | ||
|---|---|---|
| Моторы: 4 штуки лучше брать на 1 больше, пригодится |
hacker Style Brushless Outrunner 20-22L 924kv | $12. 88 88 |
| hexTronik DT700 Brushless Outrunner 700kv | $10.95 | |
| 2213N 800Kv Brushless Motor | $7.36 | |
| Пропеллеры: минимум 2 стандартных и 2 обратного вращения в начале попыток и испытаний это будет главных расходный материал, поэтому берите сразу много, заодно часть из них будет бракованное и не пригодное для использования |
10X6 Propellers (5шт) 10X6R Propellers (5шт) |
$2.40 $3.04 |
| APC 10×4.7 counter rotating propellers set | $8.50 | |
| Регуляторы скорости: 4 штуки покупать надо как и моторы с запасом, может быть брак или случайно сгорит и потом месяц ждать новый |
HobbyKing 30A BlueSeries Brushless Speed Controller они же Mystery 30A BlueSeries |
$10.47 $13.96 |
| TURNIGY Plush 25amp Speed Controller | $11. 81 81 |
|
| Источник питания с увеличением емкости растет и вес, а значит моторы будет больше потреблять, поэтому нет особого смысла брать супер емкий аккумулятор, лучше взять 2-3 мелких и менять их |
$13.79 | |
| ZIPPY Flightmax 2800mAh 3S1P 30C | $17.76 | |
| Рама стараемся делать максимально легкой и прочной |
4 алюминиевые трубки или профиль 10х10 и кусок фанерки | разобрать алюминиевый штатив |
| HobbyKing Quadcopter Frame V1 | $14.99 | |
| Мозги и датчики | ||
| Программируемый микроконтроллер | Seeeduino Mega | $43.00 |
| Arduino Mega | $64.90 | |
| Датчики рекомендую сразу брать AllInOne или FFIMU платку, так как остальные датчики очень сильно пригодятся потом |
гироскоп ITG3205 акселерометр BMA020 |
WMP $7. 98 98BMA020 230руб |
| All In One (гироскоп ITG3200, акселерометр BMA180, барометр BMP085, магнитометр HMC5883L) | $99.80 | |
| FreeFlight IMU 1.22L | €84.00 | |
| Аппаратура управления и зарядное устройство | ||
| Аппаратура управления минимум 4 канала |
Hobby King 2.4Ghz 4Ch Tx & Rx V2 (Mode 2) | $22.99 |
| Turnigy 9X 9Ch (Mode 2) | $53.79 | |
| Аккумулятор к аппаратуре | Mystery 11.1V 2200mAh | $12.72 |
| AA 600mAH Ni-MH Battery Set (8pc) | $1.99 | |
| Зарядное устройство | iMAX B6 2.5″ LCD RC Lipo Battery Balance Charger | $36.50 |
| Turnigy Accucel-6 50W 6A Balancer/Charger | $22.99 | |
| Другое | ||
| ИТОГО примерно от 220$ | ||
Сборка и настройка железа
Предположим что всё что выше у вас уже есть и можно приступать к сверлению, паянию и скручиванию.
Раму делаем кто во что горазд, главное чтобы расстояние от центра до концов лучей было одинаково, пропеллеры при вращении не задевали друг друга и центральную часть (фанерку), так как на ней будут мозги, датчики и возможно камера. Датчики лучше устанавливать на толстый скотч, силикон или резину, для уменьшения вибрации. На концах или в середине лучей можно вставить резиновые мячики, пенопласт или плотный паралон в качестве шасси для мягкого приземления.
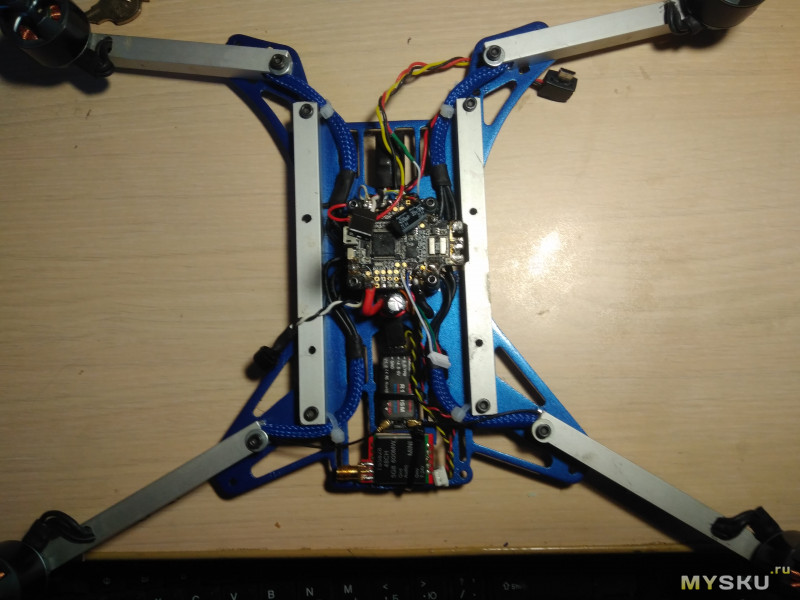
У меня получилось примерно вот так (аккумулятор крепится с другой стороны, на фото старый вариант мозгов коптера с прошивкой MultiWii, с которой мне так и не повезло):
не очень красиво, но летает
А теперь внимание косяки, о которые можно споткнутся по незнанию и нужная информация:
- Приемник надо спарить с передатчиком — написано в инструкции
- Регуляторы скорости (ESC) нужно калибровать! Для этого соединяем вместе все 4 ESC: землю (черный) и сигнальный провод(белый или желтый) и оставляем ОДИН провод питания (красный), после чего вставляем это в третий канал приемника, а так же соединяем провода питания и подсоединяем к регуляторам моторы.
 После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули
После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули - Часто регуляторы скорости нужно еще и запрограммировать, об этом читайте инструкцию к своим регуляторам, основной момент — увеличить скорость реакции, повысив частоту и выставив режим моментальной реакции, а не постепенного набора оборотов. Это можно сделать как слушая бесконечные пищания, так и с помощью специальных карточек для программирования.
- Чтобы моторы вращались в другую сторону нужно поменять любые два провода местами
- Ставьте пропеллеры в последнюю очередь — они очень хорошо режут руки
- Моторы, как и пропеллеры часто требуют балансировки, для уменьшения вибрации, для этого возьмите обычные стяжки для кабелей и нацепив 1-2 на мотор вращайте и включайте, пока не почувствуете минимальную вибрацию. Более подробно, а так же с видео лучше почитать на специализированном форуме
 После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули
После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули Более подробно, а так же с видео лучше почитать на специализированном форуме
Более подробно, а так же с видео лучше почитать на специализированном форумеPS: надеюсь люди в RC теме простят меня за неточности и поправят где надо.
Введение. Начинаем собирать квадрокоптер своими руками
Начинаю цикл статей о том, как мы собирали квадрокоптер. Предупреждаю, мы не претендуем на роль учителей и наставников. Мы просто ведем блог о том, как мы собирали летающий аппарат. Так что ошибки будут, и если вы их заметили, то обязательно напишите об этом в комментариях.
Я не являюсь специалистом в области квадрокоптеростроения, поэтому не могу подробно и четко определить классификацию данного типа устройств. Но для себя определил, что в любительской нише существует четыре типа дронов:
- Маленькие квадрики для полетов по квартире. Чуть поиграл и забыл.
- Большие дроны для съемок. Имеют большие размеры, высокую грузоподъемность, слабую маневренность.
- Гоночные коптеры. Высокая скорость, трудная управляемость, полные штаны адреналина.
- Промежуточные варианты между этими тремя типами.

Мы решили собрать большой дрон для съемок. Все-таки для гоночных нужен опыт вождения, а мелкие дроны нам не интересны.
Почему мы решили собрать квадрокоптер, а не купить готовый?
Началось все с того, что я наткнулся на рекламу дешевых квадрокоптеров. Речь идет о квадриках типа Syma X8 и им подобных. Что-то зацепило и понеслось. Вначале искал что-нибудь подешевле и получше. Потом наткнулся в YouTube на самодельные агрегаты. Посмотрел, оценил свои возможности и принял решение собрать квадрик самому.
Так почему не готовый? Все просто! Хорошая управляемость, стабильность полета, а следовательно и красивая картинка на видео получается только на дорогих квадрокоптерах, цена которых 1000$ и выше. Единственный способ к ним приблизится, это собрать дрон самому. Правильный выбор комплектующих, тонкая настройка и терпение, смогут компенсировать лишние расходы и помогут собрать действительно хороший летательный аппарат. Но, это в теории!
Но, это в теории!
Я уже вбухал в это дело кучу денег, потратил массу времени и сил, но все еще не доволен своими результатами. Может дело не в экономии и стремлении к идеалу, а в самом процессе сборки?
Какие знания нужно иметь, для того чтобы собрать квадрокоптер своими руками?
Если, например, при сборке компьютера практически нельзя совершить ошибку, т.к. там невозможно вставить что-нибудь не туда. То при сборке квадрокоптера ошибиться можно запросто. А цена такой ошибки – сгоревший модуль, возможно и не один. Добавим сюда сложность терминологии, закон Ома, мануалы на иностранных языках, наличие паяльника, напильника, лобзика и всевозможных отверток, массу свободного времени и значительные финансовые потери. В итоге получаем, что для сборки дрона нужно лишь нездоровое желание полетать на собственном детище.
Кстати, про «своими руками»! В конечном итоге, сборка квадрокоптера сводится к соединению проводами различных модулей между собой на готовой (купленной) раме, плюс их настройка и калибровка. Опытный моделист соберет такой дрон за несколько часов. Для нас, начинающих моделистов, все муки будут связаны с вопросами теоретической части, на решение которых уйдет больше 90% времени.
Опытный моделист соберет такой дрон за несколько часов. Для нас, начинающих моделистов, все муки будут связаны с вопросами теоретической части, на решение которых уйдет больше 90% времени.
Сколько стоит собрать квадрокоптер?
Базовый комплект мне обошелся в 250 долларов (без видеокамеры). Закупался я на aliexpress и banggood. Брал не самые дешевые комплектующие, но и не бренд. Поэтому путь к сокращению расходов есть!
В эту сумму вошел не только сам квадрокоптер, но и масса сопутствующих ему товаров: зарядное устройство, запасной аккумулятор, сумочки, переходники, разъемы и т.д. Поэтому, если соберетесь строить второй летательный аппарат, то он обойдется значительно дешевле.
Подробнее о ценах узнаете в следующей статье о подборе комплектующих.
Теперь к делу…
Посмотрите, как этот отважный пилот пережил свой первый полет на самодельном мультикоптере
Перейти к основному содержанию
The VergeЛоготип Verge.
Домашняя страница The Verge
The VergeЛоготип Verge.- Transpo /
- Aviation /
- Tech
/
Чувак выглядит как Fly
от Andrew J. Hawkins / @andyjayhawk
2221221212921 2222122212212921
Поделиться этой историей
На разработку у него ушло более двух лет, но недавно этот отважный швед совершил восьмиминутный полет на самодельном электрическом коптере. И какие славные восемь минут это были.
Неназванный пилот, который уже более семи лет публикует новости о своем проекте квадрокоптера под ником «amazingDIYprojects», можно увидеть жужжащим среди деревьев в этом залитом солнцем шведском лесу, словно персонаж из скандинавской сказки. В конце видео он демонстрирует вертикальное мастерство квадрокоптера, радостно подпрыгивая вверх и вниз в воздухе, сидя в центре четырех круглых несущих опор. «Это похоже на ощущение американских горок», — говорит он в какой-то момент, затаив дыхание.
В конце видео он демонстрирует вертикальное мастерство квадрокоптера, радостно подпрыгивая вверх и вниз в воздухе, сидя в центре четырех круглых несущих опор. «Это похоже на ощущение американских горок», — говорит он в какой-то момент, затаив дыхание.
Он говорит, что израсходовал 57 процентов емкости своего аккумулятора за восьмиминутный полет, что наводит его на мысль, что общее время полета равно 14 минутам. «В целом тест прошел очень хорошо, — пишет он на YouTube. «Вибрация была немного больше, чем я ожидал, а курсовая устойчивость в прямом полете была недостаточной. В этом первом полете пределы I-усиления были установлены на ноль. В следующем полете для I-предела рыскания будет установлено значение выше нуля, чтобы обеспечить лучшую курсовую устойчивость». То есть изобретатель работает над улучшением стабильности и функциональности для будущих полетов.
Это не первый любительский мультикоптер, который мы видели. У изобретателя Торстина Крайнса есть аналогичная модель с 16 опорами. E-volo, немецкий авиационный стартап, уже несколько лет занимается разработкой сверхлегких мультикоптеров с электрическим приводом. Volocopter VC200 компании, 18-роторный гибрид беспилотника и вертолета, совершил свой первый полет с экипажем в прошлом году. Между тем, гигант такси Uber заявляет, что в 2020 году запустит службу летающего такси с использованием самолетов с «вертикальным взлетом и посадкой»9.0003
E-volo, немецкий авиационный стартап, уже несколько лет занимается разработкой сверхлегких мультикоптеров с электрическим приводом. Volocopter VC200 компании, 18-роторный гибрид беспилотника и вертолета, совершил свой первый полет с экипажем в прошлом году. Между тем, гигант такси Uber заявляет, что в 2020 году запустит службу летающего такси с использованием самолетов с «вертикальным взлетом и посадкой»9.0003
Тем не менее идея использования беспилотников для перевозки пассажиров в любых коммерческих целях, подобных такси, еще далеко в будущем. Китайская компания по производству беспилотных летательных аппаратов EHang заявила, что проведет испытания своих автономных дронов-квадрокоптеров в Дубае этим летом, хотя большинство экспертов скептически относятся к этим проектам, поскольку они могут преодолеть препятствия, связанные с ограничением веса и емкостью батареи, которые потребуются для успешной перевозки пассажиров.
«Этот проект о обретении драгоценного чувства свободы».
Ничего из этого не беспокоит нашего бесстрашного шведского изобретателя. Конфигурация ротора кажется намного безопаснее, чем в предыдущих воплощениях квадрокоптера изобретателя, который имел восемь вращающихся лопастей, расположенных рядом с открытыми кабинами. Тем не менее, на изобретателе нет шлема или чего-либо, что могло бы защитить его от вращающихся роторов. Он сказал, что отказался носить какое-либо серьезное защитное снаряжение, чтобы чувствовать себя более «свободным». «Этот проект о обретении драгоценного чувства свободы», — пишет он. «10 минут за раз, LOL… Я знаю, но все же… так что носить крепость было бы контрпродуктивно».
Тем не менее, изобретатель говорит, что стремится построить максимально безопасный самолет, даже если для этого придется летать полностью обнаженным. «Я попытался обеспечить безопасность самой конструкции, чтобы чувствовать себя СВОБОДНО», — пишет он. «Очки и защита для ушей или наушники обязательны. Вся остальная одежда НЕОБЯЗАТЕЛЬНА. Я лечу в безлюдном районе, так что я могу попробовать полетать обнаженным. Я обещаю НЕ снимать видео, документирующее этот полет… LOL!»
Я обещаю НЕ снимать видео, документирующее этот полет… LOL!»
Спасибо за это.
Самые популярные
Valve представляет Counter-Strike 2, бесплатную замену CS:GO
Теперь вы можете попробовать Microsoft Loop, конкурента Notion с футуристическими документами Office
другой в дезинформационном дерьме
Pebble может вернуться — как маленький Android-телефон
Google открывает ранний доступ к своему конкуренту ChatGPT Bard — вот наши первые впечатления
Новые дроны Zipline выпускают привязанных мини-дронов для точной доставки посылок
Waze добавляет зарядные станции для электромобилей в свой инструмент планирования маршрута до $60 000
Мультикоптеры — вдохновляющие записи
Цена: $14 | ||
Вы можете загрузить электронную книгу, как только ваша покупка будет завершена. | ||
Поиск самого простого, с практической и технической точки зрения, способа построить и запустить свой собственный разумно безопасный летательный аппарат стал долгосрочным исследовательским проектом. Не всегда прогрессирует на переднем крае, но и никогда не захватывает полностью. В поисках ответа я построил различные структуры, чтобы проверить реальные возможности имеющейся концепции. Некоторые из этих концепций и мои мысли о результатах проведенных мною тестов описаны в части 1 «Ранние испытания».
Во второй части рассматриваются различные аспекты создания больших коптеров, например, проблема масштабирования радиоуправляемого беспилотника до размеров человека, а также то, что следует учитывать, если вы используете 3D-печатные детали в своей конструкции.
После того, как я остановился на многороторном подходе, я начал с установки, которая, по моим оценкам, будет самой дешевой.
Поскольку я уже мог позволить себе попробовать электрический подход, который оказался успешным, я пошел дальше и сделал именно то, что описано в части 4, «Мультиротор V3» (CHAIR).
Содержимое
Часть 1: Ранние испытания
Простое крыло из стекловолокна
Крыло с полыми нарезками из пеноматериала
Крылья воздушного змея
Полужесткое парафойловое крыло
Крыло воздушного змея без лонжеронов0102 Самодельный мультиротор с большим пропеллером
Часть 2. Пилотируемые мультикоптеры
Масштабирование задач
Материалы
3D-печать
Контроллеры полета
Радиоуправляемые передатчики и приемники
Испытательные стенды
10-2 Критерии проектирования
V10-2 10100Технический обзор
Положительные стороны
Отрицательные стороны
Рама
Сиденье
Силовая передача
Контроллер полета
Джойстик
Практические летные испытания
Часть 4: Multirotor V3
Критерии проектирования
Технический обзор
Положительные аспекты
Отрицательные аспекты
Инструменты, изготовленные по индивидуальному заказу
Рама – пропульсивные кольца
Рама – сиденье
Силовая передача
Контроллеры
Практическое тестирование мультимедиа
Джойстик полета 9010 .