Квадрокоптер своими руками: Часть I / Хабр
ВНИМАНИЕ, статья устарела, но её всё еще можно использовать в ознакомительных целях
Как и обещал, как только полечу — напишу полноценный пост по поводу сборки своего летающего агрегата. Наверняка многие давно посмотрели как «обычный» офисный сотрудник собирает это за 2 часа, сразу отмечу что я не «обычный» офисный работник, поэтому летчик из меня пока не очень, но важно что квадрокоптер летает и адекватно реагирует на управление. Первое и самое главное — если решили собирать, не экономьте и не думайте что вы умнее тех кто уже летает, так же учтите, что теория несколько расходится с практикой.
Есть большое число прошивок, готовых контроллеров, вариантов датчиков, моторов и т.д. и т.п. — выбрать есть из чего, но в статье остановлюсь только на одном варианте, основанном на Arduino Mega, прошивке MegaPirate и относительно дешевых датчиках.
Результат
Чтобы не мучить тебя, %username%, вот так оно летает без особых настроек, калибровок и балансировок в неумелых руках:
А теперь что же нам потребуется для этого…
Детали и цены
Самое важное и минимальное что потребуется для сборки с нуля (первым в списке идет то, что использовал я, затем то что используют многие другие):
| Сам квадрокоптер | ||
|---|---|---|
| Моторы: 4 штуки лучше брать на 1 больше, пригодится |
hacker Style Brushless Outrunner 20-22L 924kv | $12. 88 88 |
| hexTronik DT700 Brushless Outrunner 700kv | $10.95 | |
| 2213N 800Kv Brushless Motor | $7.36 | |
| Пропеллеры: минимум 2 стандартных и 2 обратного вращения в начале попыток и испытаний это будет главных расходный материал, поэтому берите сразу много, заодно часть из них будет бракованное и не пригодное для использования |
10X6 Propellers (5шт) 10X6R Propellers (5шт) |
$2.40 $3.04 |
| APC 10×4.7 counter rotating propellers set | $8.50 | |
| Регуляторы скорости: 4 штуки покупать надо как и моторы с запасом, может быть брак или случайно сгорит и потом месяц ждать новый |
HobbyKing 30A BlueSeries Brushless Speed Controller они же Mystery 30A BlueSeries |
$10.47 $13.96 |
| TURNIGY Plush 25amp Speed Controller | $11. 81 81 |
|
| Источник питания с увеличением емкости растет и вес, а значит моторы будет больше потреблять, поэтому нет особого смысла брать супер емкий аккумулятор, лучше взять 2-3 мелких и менять их |
Turnigy 2200mAh 3S 30C Lipo | $13.79 |
| ZIPPY Flightmax 2800mAh 3S1P 30C | $17.76 | |
| Рама стараемся делать максимально легкой и прочной |
4 алюминиевые трубки или профиль 10х10 и кусок фанерки | разобрать алюминиевый штатив |
| HobbyKing Quadcopter Frame V1 | $14.99 | |
| Мозги и датчики | ||
| Программируемый микроконтроллер | Seeeduino Mega | $43.00 |
| Arduino Mega | $64.90 | |
| Датчики рекомендую сразу брать AllInOne или FFIMU платку, так как остальные датчики очень сильно пригодятся потом |
гироскоп ITG3205 акселерометр BMA020 |
WMP $7. 98 98BMA020 230руб |
| All In One (гироскоп ITG3200, акселерометр BMA180, барометр BMP085, магнитометр HMC5883L) | $99.80 | |
| FreeFlight IMU 1.22L | €84.00 | |
| Аппаратура управления и зарядное устройство | ||
| Аппаратура управления минимум 4 канала |
Hobby King 2.4Ghz 4Ch Tx & Rx V2 (Mode 2) | $22.99 |
| Turnigy 9X 9Ch (Mode 2) | $53.79 | |
| Аккумулятор к аппаратуре | Mystery 11.1V 2200mAh | $12.72 |
| AA 600mAH Ni-MH Battery Set (8pc) | $1.99 | |
| Зарядное устройство | iMAX B6 2.5″ LCD RC Lipo Battery Balance Charger | $36.50 |
| Turnigy Accucel-6 50W 6A Balancer/Charger | $22.99 | |
| так же потребуются проводочки, болтики, винтики, стяжки, дрель, паяльник с паяльными принадлежностями и более-менее прямые руки | ||
| ИТОГО примерно от 220$ | ||
Сборка и настройка железа
Предположим что всё что выше у вас уже есть и можно приступать к сверлению, паянию и скручиванию.
Раму делаем кто во что горазд, главное чтобы расстояние от центра до концов лучей было одинаково, пропеллеры при вращении не задевали друг друга и центральную часть (фанерку), так как на ней будут мозги, датчики и возможно камера. Датчики лучше устанавливать на толстый скотч, силикон или резину, для уменьшения вибрации. На концах или в середине лучей можно вставить резиновые мячики, пенопласт или плотный паралон в качестве шасси для мягкого приземления.
не очень красиво, но летает
А теперь внимание косяки, о которые можно споткнутся по незнанию и нужная информация:
- Приемник надо спарить с передатчиком — написано в инструкции
- Регуляторы скорости (ESC) нужно калибровать! Для этого соединяем вместе все 4 ESC: землю (черный) и сигнальный провод(белый или желтый) и оставляем ОДИН провод питания (красный), после чего вставляем это в третий канал приемника, а так же соединяем провода питания и подсоединяем к регуляторам моторы.
 После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули
После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули - Часто регуляторы скорости нужно еще и запрограммировать, об этом читайте инструкцию к своим регуляторам, основной момент — увеличить скорость реакции, повысив частоту и выставив режим моментальной реакции, а не постепенного набора оборотов. Это можно сделать как слушая бесконечные пищания, так и с помощью специальных карточек для программирования.
- Чтобы моторы вращались в другую сторону нужно поменять любые два провода местами
- Ставьте пропеллеры в последнюю очередь — они очень хорошо режут руки
- Моторы, как и пропеллеры часто требуют балансировки, для уменьшения вибрации, для этого возьмите обычные стяжки для кабелей и нацепив 1-2 на мотор вращайте и включайте, пока не почувствуете минимальную вибрацию. Более подробно, а так же с видео лучше почитать на специализированном форуме
 После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули
После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули Более подробно, а так же с видео лучше почитать на специализированном форуме
Более подробно, а так же с видео лучше почитать на специализированном форумеПродолжение
PS: надеюсь люди в RC теме простят меня за неточности и поправят где надо.
Строим первый квадрокоптер, с чего начать, раскажет Planeta Hobby!
21 июня 2017
3328 заинтересовались
Статью подготовила
Катерина Абрамцова
Контент-менеджер
Прежде чем перейти к сборке квадрокоптера самостоятельно, мы все же рекомендуем приобрести маленький квадрик для получения опыта. Зачем? Вам будет понятен механизм строения такого четырехмоторного устройства как дрон. Вы сможете ознакомиться с принципом работы квадрика, а также сможете оттачивать навыки пилотирования такие как:
- зависание
- полет по кругу
- восьмерка
- лавирование между преградами
- полет в ветреную погоду
- определение головы девайса и т. д.
Не имея основ, даже при правильной сборке вы можете просто-напросто разбить свое творения из-за нехватки опыта! И не спешите сразу сооружать аппарат для фото- и видеосъемки, иначе огорчений не избежать.
Первое, с чем нужно определиться, это со схемой расположения винтов. Она бывает, X-образной, H-образной или + расположением моторов. Самой стабильной считается Х-схема.
Второе, начинаем подбирать комплектующие. Вот с этим моментом все будет гораздо сложнее. Давайте по очереди:
- Рама является главным звеном в квадрике, так как на нее будут устанавливаться все запчасти и электроника вертушки. Лучше выбирать размер 330-450, что означает размер диагонали между двумя противоположными моторами в миллиметрах.
- Двигатели – это сердце конструкции. Так как мы собираем бюджетный вариант, то советуем устанавливать коллекторные движки. Они по стоимости будут дешевле, нежели бесколлекторные.
- Контроллер Arduino для квадрокоптера своими руками шикарный вариант. Это выгодное приобретение с точки зрения финансовых затрат. Обязательно необходимы еще 3-осевой гироскоп и акселерометр. С их помощью можно измерять ускорение и угловую скорость. Так же для большего и уверенного контроля можно выбрать плату управления Naza. Квадрокптер без проблем поместит хоть один, хоть другой девайс. Вся разница в их стоимость. Они оба управляют движками и не дают дрону разбиться.
- Еще потребуются аккумуляторы. Лучше останавливаться на литиевых. Они имеют разные показатели емкости, напряжения, токоотдачи. Могут иметь как твердый, так и мягкий корпус. В состав входят от 1 до 6 банок. В нашем случае выбираем 2-3 баночных акб. Опять-таки, размеры батареи так же меняются от производителя и цели назначения.
- И еще один элемент для постройки квадрокоптера на Arduino – пульт управления и приемник. Для воздушных моделей нужно выбирать аппу от 4 каналов, а ресивер от 5.
 С их помощью можно измерять ускорение и угловую скорость. Так же для большего и уверенного контроля можно выбрать плату управления Naza. Квадрокптер без проблем поместит хоть один, хоть другой девайс. Вся разница в их стоимость. Они оба управляют движками и не дают дрону разбиться.
С их помощью можно измерять ускорение и угловую скорость. Так же для большего и уверенного контроля можно выбрать плату управления Naza. Квадрокптер без проблем поместит хоть один, хоть другой девайс. Вся разница в их стоимость. Они оба управляют движками и не дают дрону разбиться.Скажем так, это самые основные моменты в процессе сборки квадрокоптера. Для того чтобы менять и улучшать его характеристики вы можете самостоятельно опробовать различные варианты запчастей и отслеживать поведение дрона в воздухе.
Альтернативное решение
А для тех, кому не хочется долго замарачиваться над подбором электроники и всех необходимых аксессуаров при сборке первого дрона, мы рекомендуем приобрести Kit-набор. Его суть заключается в том, что все или почти все необходимые элементы находятся в коробке. От вас же всего лишь требуется следовать инструкции по сборке беспилотника. Таким образом, вы самостоятельно соберете квдарокоптер на радиоуправлении не тратя время на изучение особенностей различных запчастей и совместимость между собой.
Ну а если в ходе прочтения данной статьи у вас напрочь отпало желание что-либо конструировать, но все же вы хотите летать, тогда загляните в этот раздел. Здесь находятся квадрокоптеры на начинающих пилотов по приятной цене и полностью готовыми к полету.
Помните, что вы всегда можете обратиться к специалистам «Planeta Hobby» за консультацией, советом или ремонтом. Ведь процесс сборки квадрокоптера это достаточно интересное и одновременно сложное увлечение и хобби.
Как собрать безопасный на ощупь дрон — Parastoo Abtahi
В этом посте я покажу вам, как построить безопасную клетку для вашего дрона. Я предполагаю, что вы либо владеете коммерческим дроном, либо уже построили свой собственный! Если вы хотите узнать больше о технических характеристиках собственного беспилотника, который у нас есть, ознакомьтесь с нашей исследовательской статьей и видео.
Прежде чем начать
Первое, что вам нужно сделать, это убедитесь, что ваш дрон действительно может нести дополнительный вес . Для некоторых коммерческих дронов вы можете найти эту информацию в Интернете — просто введите «грузоподъемность» вашего конкретного дрона. Или вы можете придумать свой собственный эксперимент: прикрепите дополнительный груз (можно использовать монеты) к корпусу вашего дрона и попробуйте запустить его. Чтобы найти предел максимального веса, постепенно увеличивайте добавленный вес (добавляя больше монет), пока он не перестанет быть стабильным во время полета или не сможет взлететь. Вы также можете просмотреть онлайн-форумы, чтобы узнать, не пытался ли кто-нибудь получить эти измерения для вашего дрона. Если вы обнаружите, что ваш дрон не может нести достаточный вес, то нецелесообразно строить для него безопасную клетку, по крайней мере, без модификации самого дрона. «Достаточный вес» зависит от размера вашего дрона и конструкции клетки, но моя клетка весит около 80 граммов.
Вы также можете просмотреть онлайн-форумы, чтобы узнать, не пытался ли кто-нибудь получить эти измерения для вашего дрона. Если вы обнаружите, что ваш дрон не может нести достаточный вес, то нецелесообразно строить для него безопасную клетку, по крайней мере, без модификации самого дрона. «Достаточный вес» зависит от размера вашего дрона и конструкции клетки, но моя клетка весит около 80 граммов.
Вещи, которые вам понадобятся
Основные вещи, которые вам понадобятся, это трубки из углеродного волокна (я купил «Трубка из углеродного волокна, внешний диаметр 1/8 дюйма, внутренний диаметр 0,072 дюйма, длина 4 фута» у MacMaster), доступ к 3D-принтеру (я использовал 3D-принтер Formlabs Form2) и сетчатой сетке (я использовал прозрачную сетчатую сетку размером 6 x 4 фута на Amazon от Far Edge Aquatics) . Вам также понадобятся некоторые инструменты для безопасной резки трубок из углеродного волокна (подробнее об этом позже, но я использовал маску для лица, перчатки и ручную пилу), а также измерительные инструменты, сумасшедший клей, клейкая лента и леска.
Шаг 1: измерение и планирование
Первое, что вам нужно сделать, это измерить размеры вашего дрона по разным осям. Нарисуйте схему того, как вы хотите, чтобы ваша клетка выглядела. Добавьте размеры вашей клетки на схему и убедитесь, что у вас достаточно места сверху, снизу и вокруг пропеллеров, чтобы они могли свободно вращаться. У меня был относительно небольшой дрон, поэтому я выбрал простую прямоугольную кубовидную конструкцию для основной части клетки. Чтобы надежно прикрепить раму к корпусу дрона, я добавил две параллельные трубки из углеродного волокна на дно клетки. Я также добавил прямоугольную рамку к нижней части основной клетки, чтобы она действовала как крышка, позволяя открывать клетку и менять батарею.
Шаг 2: подготовка деталей рамы
Следующее, что вам нужно сделать, это спроектировать соединения . Вы можете загрузить 3D-модель суставов, которые я использовал здесь, и распечатать их на 3D-принтере, или вы можете использовать программное обеспечение для 3D-моделирования, чтобы создать свою собственную. У меня есть несколько разных разъемов. В углах основной рамы имеется 8-кратное соединение. Это 1/8 сферы, чтобы их нельзя было легко разбить. Есть 4x плоских шарнира для углов крышки. 2 петли для крепления крышки к раме. 2x плоские детали для закрытия крышки. 4 разъема для крепления двух параллельных труб к основной раме. И, наконец, 4 разъема для подключения двух параллельных трубок к дрону. В зависимости от вашего дрона вам могут понадобиться разъемы разной формы и размера для крепления клетки к вашему дрону — вы должны подумать об этом сейчас, а не после того, как вы собрали клетку. На фотографии выше не обращайте внимания на два висящих разъема сверху — они были разработаны для нашего конкретного приложения.
У меня есть несколько разных разъемов. В углах основной рамы имеется 8-кратное соединение. Это 1/8 сферы, чтобы их нельзя было легко разбить. Есть 4x плоских шарнира для углов крышки. 2 петли для крепления крышки к раме. 2x плоские детали для закрытия крышки. 4 разъема для крепления двух параллельных труб к основной раме. И, наконец, 4 разъема для подключения двух параллельных трубок к дрону. В зависимости от вашего дрона вам могут понадобиться разъемы разной формы и размера для крепления клетки к вашему дрону — вы должны подумать об этом сейчас, а не после того, как вы собрали клетку. На фотографии выше не обращайте внимания на два висящих разъема сверху — они были разработаны для нашего конкретного приложения.
Затем вы хотите использовать свою схему и измерить длину каждого куска трубки из углеродного волокна , которая вам нужна. Обязательно учтите ваши напечатанные на 3D-принтере разъемы и обрежьте трубы короче, чем длина сторон общей рамы. Я использовал белую малярную ленту, чтобы примерно отметить точки, которые я хотел вырезать. Затем я использовал ручку, чтобы отметить точное положение поверх клейкой ленты. Обязательно учитывайте несколько миллиметров углеродного волокна, которые вы потеряете при их разрезании.
Затем я использовал ручку, чтобы отметить точное положение поверх клейкой ленты. Обязательно учитывайте несколько миллиметров углеродного волокна, которые вы потеряете при их разрезании.
После того, как вы измерили и промаркировали трубки из углеродного волокна, вам нужно разрезать каждую деталь! Для этого я использовал ручную пилу, а мой друг держал трубку из углеродного волокна на краю стола. Вы можете использовать зажим, но он может сломать трубку. ПРЕДУПРЕЖДЕНИЕ: Резка трубок из углеродного волокна может быть очень опасной!!! Перед тем, как пытаться сделать это, обязательно проведите собственное исследование. В частности, вы хотите предотвратить попадание пыли из углеродного волокна в ваши легкие, а также не касаться отрезанных кусков углеродного волокна. Я делал это на улице, и во время процесса я был в рубашке с длинным рукавом, перчатках, маске и защитных очках. У меня не было подходящей маски, поэтому, чтобы предотвратить образование пыли, я обрабатывал трубки из углеродного волокна проточной водой при их резке. Опять же, обязательно проведите собственное исследование! После вырезания, не снимая перчаток, я отшлифовал концы каждого отрезанного куска и приклеил их суперклеем.
Опять же, обязательно проведите собственное исследование! После вырезания, не снимая перчаток, я отшлифовал концы каждого отрезанного куска и приклеил их суперклеем.
Шаг 3: сборка
Теперь, когда у вас есть все детали, необходимые для сборки каркаса, пришло время собрать . Для этого вам понадобятся напечатанные на 3D-принтере разъемы, вырезанные трубки из углеродного волокна и суперклей (я использовал суперклей Loctite gel control ). Чтобы убедиться, что все стороны находятся под прямым углом, я рекомендую распечатать точную форму вашей рамы и использовать ее в качестве шаблона для сборки. Вы хотите нанести небольшое количество клея на каждый разъем (по одному) и начать сборку. Чтобы ускорить этот процесс, я использовал ускоритель супер клея. Если вы решите использовать ускоритель, обязательно следуйте инструкциям по безопасности.
Шаг 4: добавление сетки
Пришло время обмотать рамку сеткой! Первое, что вам нужно сделать, это отмерить и разрезать сетку-рабицу .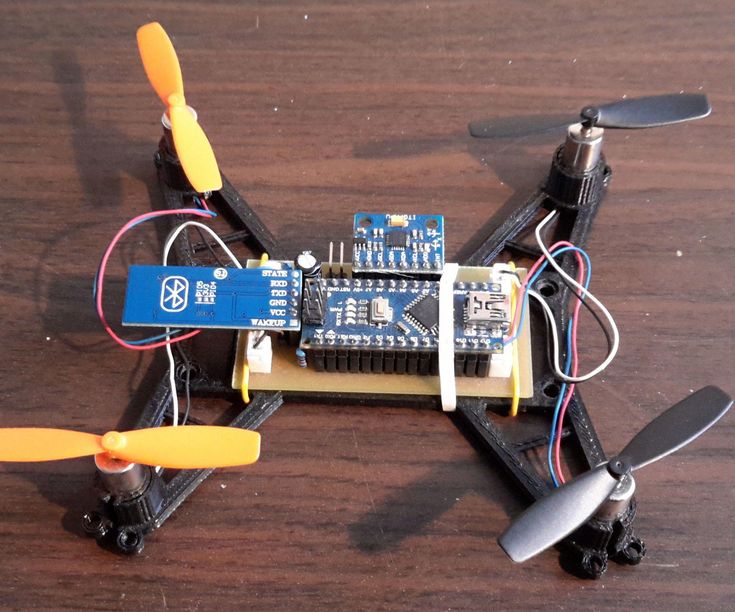 Я вырезал один кусок для основной рамы (закрывающий верхнюю часть и четыре стороны) и отдельный кусок для крышки. Чтобы прикрепить сетку к клетке, я начал с того, что обмотал несколько тонких кусочков клейкой ленты (по 3 или 4 тонкие полоски на край) вокруг трубок из углеродного волокна и через отверстия в сетке. Вы должны натянуть сетку как можно сильнее, прежде чем прикрепить ее к трубке из углеродного волокна, чтобы убедиться, что она полностью натянута. После этого с помощью лески я пришила сетку по всему периметру рамы. Это может быть необязательным шагом, но он помогает еще больше натянуть сетку и предотвращает ее коробление между точками, которые были заклеены скотчем. Сшивание также позволяет завернуть края сетки внутрь и удалить все острые края.
Я вырезал один кусок для основной рамы (закрывающий верхнюю часть и четыре стороны) и отдельный кусок для крышки. Чтобы прикрепить сетку к клетке, я начал с того, что обмотал несколько тонких кусочков клейкой ленты (по 3 или 4 тонкие полоски на край) вокруг трубок из углеродного волокна и через отверстия в сетке. Вы должны натянуть сетку как можно сильнее, прежде чем прикрепить ее к трубке из углеродного волокна, чтобы убедиться, что она полностью натянута. После этого с помощью лески я пришила сетку по всему периметру рамы. Это может быть необязательным шагом, но он помогает еще больше натянуть сетку и предотвращает ее коробление между точками, которые были заклеены скотчем. Сшивание также позволяет завернуть края сетки внутрь и удалить все острые края.
Шаг 5: прикрепление дрона
Теперь, когда у вас есть готовая клетка, последний шаг — прикрепить дрон . Я использовал 3M двустороннюю ленту с очень высоким сцеплением (VHB), чтобы прикрепить 3D-печатные разъемы (3D-печатные детали, которые мы разместили на двух параллельных трубках) к моему дрону.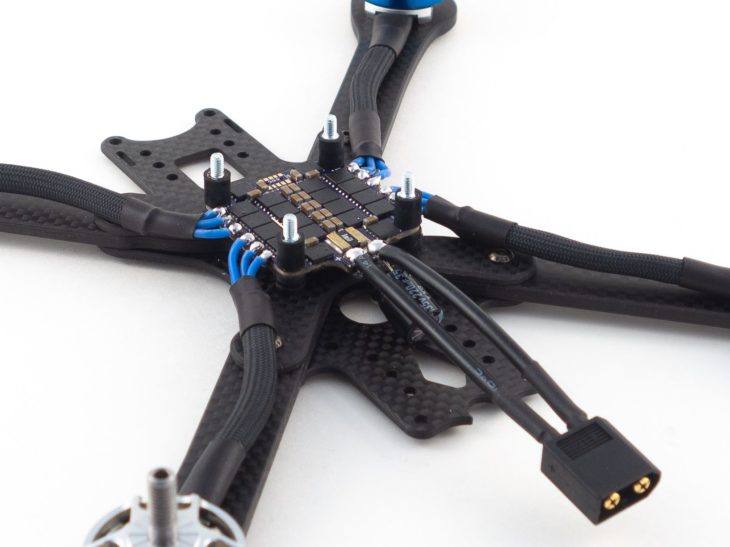 В зависимости от вашего дизайна вам, возможно, придется подумать о других механизмах крепления клетки к дрону. Я также добавил четыре куска пены на дно клетки, чтобы защитить ее во время приземления, и приклеил липучку на две плоские части, чтобы закрыть крышку.
В зависимости от вашего дизайна вам, возможно, придется подумать о других механизмах крепления клетки к дрону. Я также добавил четыре куска пены на дно клетки, чтобы защитить ее во время приземления, и приклеил липучку на две плоские части, чтобы закрыть крышку.
И… ГОТОВО!
Но действительно ли это безопасно?
Не совсем так! Термин «безопасная клетка» подразумевает только то, что при случайном прикосновении к дрону сетчатая клетка, скорее всего, не позволит вам коснуться вращающихся лопастей и потенциально порезаться. Но имейте в виду, что построенная вами клетка, скорее всего, будет менее прочной, чем ваш дрон. Так что, если дрон упадет, при достаточно большой силе удара клетка, вероятно, сломается, а разлетающиеся кусочки пластика и сломанные стержни из углеродного волокна могут быть действительно опасны! По моему опыту, во время столкновения с сильным ударом пластиковые соединения сломались, а сетчатая обертка скрепила большинство сломанных компонентов, поэтому они не разбились повсюду, но будьте осторожны!
Это лучшая конструкция безопасной клетки?
Определенно нет — это всего лишь функциональный прототип, который был достаточно хорош для нашего конкретного случая использования! Я призываю вас изучить другие варианты. На самом деле, я пришел к этому дизайну после перебора множества каркасов для различных коммерческих и нестандартных дронов. Вы можете увидеть некоторые из них ниже: я начал с лазерной резки пенопластового сердечника в решетчатую структуру, затем построил цилиндрические деревянные рамы и, наконец, перешел к различным рамам из углеродного волокна. Другой дизайн может подойти вам гораздо лучше, особенно если ваш дрон имеет другую форму, размер или грузоподъемность.
На самом деле, я пришел к этому дизайну после перебора множества каркасов для различных коммерческих и нестандартных дронов. Вы можете увидеть некоторые из них ниже: я начал с лазерной резки пенопластового сердечника в решетчатую структуру, затем построил цилиндрические деревянные рамы и, наконец, перешел к различным рамам из углеродного волокна. Другой дизайн может подойти вам гораздо лучше, особенно если ваш дрон имеет другую форму, размер или грузоподъемность.
Удачи!
Надеюсь, я вдохновил вас на создание собственной безопасной клетки для дронов! Если у вас есть какие-либо вопросы, не стесняйтесь спрашивать, и если вы сделаете свою собственную клетку, отметьте меня в социальных сетях, чтобы я мог видеть ваши потрясающие дизайны! Я также рекомендую вам ознакомиться с нашим исследовательским документом и видео, чтобы увидеть, как мы использовали этот безопасный дрон для тактильных ощущений в виртуальной реальности!
Переход от DJI к самоделке
Хотя я не считаю себя очень опытным пилотом дронов, я довольно много времени управляю джойстиками нескольких разных моделей DJI, особенно из линейки дронов Mavic. Итак, когда прошлым летом я решил собрать свой первый дрон «сделай сам», чтобы лучше понять подсистемы, участвующие в полете квадрокоптеров, я подумал, насколько это может быть сложно? Я скоро научусь, довольно трудно.
Итак, когда прошлым летом я решил собрать свой первый дрон «сделай сам», чтобы лучше понять подсистемы, участвующие в полете квадрокоптеров, я подумал, насколько это может быть сложно? Я скоро научусь, довольно трудно.
Я думаю, что очень немногие люди, даже те, кто регулярно летает на популярных коммерческих самолетах, таких как DJI, по-настоящему ценят удивительную устойчивость этих самолетов. Нельзя недооценивать их невероятную способность удерживать высоту и положение даже в ветреную погоду. Кроме того, то, как эти самолеты сглаживают кривую обучения новых пилотов, является одновременно и благословением, и проклятием; Благо в том, что вы можете быстро и безопасно подняться в воздух, но проклятие в том, что создается ложное впечатление, что вы можете управлять любым квадрокоптером — факт, который, как я вскоре узнал, был неверным в моей ситуации.
Прежде всего, я выбрал раму из углеродного волокна (что оказалось действительно хорошим решением), но помимо этого использовал довольно стандартные детали. Я выбрал полетный контроллер Pixhawk в качестве основы своей системы, основываясь на отзывах и возможностях, намного превосходящих его предшественника. Этот контроллер и программное обеспечение, которое использовалось для его программирования, Ardupilot’s Mission Planner, оказались серебряной подкладкой в то лето, которое теоретически было заполнено множеством дождевых облаков. Помимо двигателей и электронных регуляторов скорости (ESC), большая часть вспомогательного оборудования была частью пакета, который сопровождал полетный контроллер.
Я выбрал полетный контроллер Pixhawk в качестве основы своей системы, основываясь на отзывах и возможностях, намного превосходящих его предшественника. Этот контроллер и программное обеспечение, которое использовалось для его программирования, Ardupilot’s Mission Planner, оказались серебряной подкладкой в то лето, которое теоретически было заполнено множеством дождевых облаков. Помимо двигателей и электронных регуляторов скорости (ESC), большая часть вспомогательного оборудования была частью пакета, который сопровождал полетный контроллер.
Затем начался долгий, но интересный проект по изучению (и подключению) всех этих компонентов вместе, с ожиданием легкого взлета и плавного полета по завершении; как вы, вероятно, догадались, основываясь на моих предыдущих комментариях, это предположение было неверным, и проводка и понимание системы стали наименьшей из моих проблем при безопасном взлете этого нового самолета с земли. Закончив со всей проводкой, я очень гордился своим творением (см. рис. 1) и был готов к своему первому полету, по крайней мере, так я думал. После того, как я мысленно приспособился к тому, что ручка газа не центрируется, как это делают большинство моделей DJI, я попытался совершить свой первый взлет, плохо понимая различные режимы полета и то, как запрограммировать пульт дистанционного управления, чтобы выбрать подходящий для текущего сценария. Это было после того, как (мне стыдно признаться в этом) я перевернул пропеллеры так, чтобы они поднимали самолет от земли, а не толкали его вниз.
рис. 1) и был готов к своему первому полету, по крайней мере, так я думал. После того, как я мысленно приспособился к тому, что ручка газа не центрируется, как это делают большинство моделей DJI, я попытался совершить свой первый взлет, плохо понимая различные режимы полета и то, как запрограммировать пульт дистанционного управления, чтобы выбрать подходящий для текущего сценария. Это было после того, как (мне стыдно признаться в этом) я перевернул пропеллеры так, чтобы они поднимали самолет от земли, а не толкали его вниз.
Рис. 1. Мой самодельный дрон до первого полета/крушения
После взлета стало очевидно (довольно быстро), что это не дрон DJI, и мне еще предстояло многому научиться. Тот полет, если его можно так назвать, длился недолго и закончился моей первой из многих аварий. Я бы провел остаток своих летних каникул, изучая все о контурах PID, калибровке ESC, режимах полета и обо всем остальном, что пилоты DJI считают само собой разумеющимся; все время будучи благодарным за ту раму из углеродного волокна, за которую я изначально доплатил; это потребовало МНОГО злоупотреблений и никогда не подводило, в отличие от других компонентов, которые мне приходилось заменять.
Луч надежды, о котором я упоминал ранее, планировщик миссий Ardupilot, стал моим новым лучшим другом и центром моего обучения. Это удивительное программное обеспечение, поддерживаемое сообществом, чрезвычайно универсально, и не только для квадрокоптеров. Мечта разработчика, точный контроль над таким количеством переменных, а также возможность загружать и отслеживать бесчисленные характеристики полета, делают его идеальным программным обеспечением для программирования самодельных самолетов всех типов. Сердцем этой системы является экран «Полетные данные» (см. рис. 2), который позволяет пилоту или наземному персоналу контролировать все жизненно важные функции самолета и показывает точное, легко читаемое положение и положение/курс самолета на большой карте. . Перед первоначальным запуском Mission Planner имеет несколько экранов настройки и конфигурации, с которыми пользователи должны ознакомиться, особенно с параметрами «настройки» и конфигурациями режима полета.
Рис. 2. Экран полетных данных программы Ardupilot Mission Planner
2. Экран полетных данных программы Ardupilot Mission Planner
Именно на этих экранах настройки я начал осознавать мощь этого программного летательных аппаратов, таких как линейка DJI Mavic. Хотя список атрибутов, которые можно настроить и установить, занимает буквально несколько страниц, две подсистемы действительно выделяются; один из-за его сложности, а другой из-за абсолютной необходимости в отношении пользователя, имеющего твердое понимание этого. Сложный — это регуляторы усиления на главной оси, которые определяют летные характеристики всех квадрокоптеров — крен, тангаж, рыскание и газ или высота.
Обычно называемые ПИД-контурами, относящиеся к пропорционально-интегрально-производным математическим функциям, используемым для обеспечения правильной реакции дрона без чрезмерной коррекции или слишком медленной реакции на входные данные в четырех основных плоскостях движения. Хотя для них существуют настройки по умолчанию, для обеспечения стабильного полета их необходимо настроить для каждого конкретного самолета. На эти настройки могут влиять многие характеристики самолета, включая очевидные, такие как вес и доступная тяга, но даже более тонкие вещи, такие как длина пропеллера.
На эти настройки могут влиять многие характеристики самолета, включая очевидные, такие как вес и доступная тяга, но даже более тонкие вещи, такие как длина пропеллера.
Хотя ПИД-контур необходимо понимать, по крайней мере, на функциональном уровне, понимание и настройка режимов полета для пульта дистанционного управления имеет решающее значение. Большинству пилотов дронов-любителей, особенно тем, кто использует продукты DJI, неизвестно, что возможность отпустить элементы управления и удерживать дрон в текущем положении — это особый режим полета, называемый «праздношатание», и не присущий всем дронам. В Планировщике миссий есть 24 возможных режима, и лишь около половины из них представляет интерес для большинства пилотов. Помимо режима ожидания, упомянутого ранее, есть режимы, которые имеют смысл для всех, кто когда-либо летал на дронах — «Вернуться на землю» (домой) и приземлиться. Режим полета по умолчанию для большинства контроллеров, который вызвал большинство моих ранних сбоев, — это режим стабилизации. В этом режиме «стабилизируются» только крен и тангаж, и пилот должен все время активно управлять самолетом. Это было серьезное изменение, связанное с полетами на самолетах DJI; понимание этого и изучение того, как программировать мой пульт дистанционного управления для выбора различных режимов, было важным первым шагом в достижении безопасного и контролируемого полета.
В этом режиме «стабилизируются» только крен и тангаж, и пилот должен все время активно управлять самолетом. Это было серьезное изменение, связанное с полетами на самолетах DJI; понимание этого и изучение того, как программировать мой пульт дистанционного управления для выбора различных режимов, было важным первым шагом в достижении безопасного и контролируемого полета.
Одним из увлекательных режимов, объединяющих две важные подсистемы, описанные выше, является режим «автонастройки». В этом режиме дрон самостоятельно выполняет серию движений и регулирует контуры PID на основе обратной связи от бортовых инерциальных измерительных блоков (IMU), которые в основном содержат акселерометр и гироскоп. Хотя это и не является абсолютной необходимостью, этот дополнительный шаг определенно повысит стабильность полета и особенно поможет начинающим пилотам-самоучкам при переходе с коммерческого самолета.
Как вы, наверное, догадались, когда я наконец добился стабильного полета (см. рис. 3), это был момент удовлетворения. Однако, в отличие от мгновенного удовольствия, которое приходит с летающими коммерческими моделями, такими как продукты DJI, это ждало долго. Я не могу переоценить то, как много я узнал во время этого процесса, который помог мне не только как пилоту, но и с точки зрения моих технических знаний обо всем, что делает дроны такими стабильными и универсальными. Этот опыт также открыл для меня огромное количество новых возможностей с точки зрения развития и деловых возможностей. Трудно представить, что не существует нишевого рынка для полностью настраиваемых, специализированных систем, которые конкурируют с высокопроизводительными системами в стиле Matrice по гораздо более низкой цене.
3), это был момент удовлетворения. Однако, в отличие от мгновенного удовольствия, которое приходит с летающими коммерческими моделями, такими как продукты DJI, это ждало долго. Я не могу переоценить то, как много я узнал во время этого процесса, который помог мне не только как пилоту, но и с точки зрения моих технических знаний обо всем, что делает дроны такими стабильными и универсальными. Этот опыт также открыл для меня огромное количество новых возможностей с точки зрения развития и деловых возможностей. Трудно представить, что не существует нишевого рынка для полностью настраиваемых, специализированных систем, которые конкурируют с высокопроизводительными системами в стиле Matrice по гораздо более низкой цене.
Рисунок 3 – Наконец-то! Стабильный полет с моим самодельным дроном.
Следующим шагом будет установка и программирование двух основных функций, которые владельцы DJI считают само собой разумеющимися: предотвращение столкновений и управление подвесом/датчиком.