Гоночный FPV-дрон своими руками (часть 1) — сборка / Habr
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX h3205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель.
- MICRO MinimOSD.
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.
Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.
Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
habr.com
Как сделать квадрокоптер
Мастер-самодельщик давно увлекается авиамоделями. Сначала это были модели самолетов, затем квадрокоптеры. В этой статье мастер расскажет какие материалы лучше выбрать для квадрокоптера, а также как сделать раму из фанеры. Давайте посмотрим небольшое демонстрационное видео.
Для изготовления квадрокоптера мастер использовал следующие
Инструменты и материалы:
-Березовая фанера;
-Контроллер Omnibus F4, SP Racing F3;
-Распределительный щит питания Mateck;
-Контроллер HGLRC 28A BLHeli ESC — 4 шт;
-Мотор Racestar BR2204 2600Kv Racing Edition -4 шт;
-Пропеллеры KingKong 5X4X3 — 4 шт;
-Радиомодуль Flsky TH9X с приемником;
-Аккумулятор Gens 3800 мАч;
-Стойки; — 16 шт;
-Винты M3;
-Отвертка;
-Паяльные принадлежности;
-Нож;
-ЧПУ-резак;
Шаг первый: выбор материала
Рамка.
Обычно рамка изготавливается из легких и жестких компонентов, таких как стекловолокно, углеродное волокно, дерево, алюминий и т. д. Существует множество различных типов рам, мастер будет делать рамку под четыре двигателя.
Такие рамки бывают в основном в Н-форме или Х-форме. X-форма является хорошим балансом между стабильностью и маневренностью. Именно такую рамку и будет делать мастер.
Контроллер.
Контроллер управляет работой двигателей. На диаграмме видно, что все двигатели вращаются в противоположных направлениях, чтобы нейтрализовать крутящий момент, создаваемый каждым двигателем. Контроллер является мозгом квадрокоптера, это в основном небольшой компьютер, который использует свои датчики для постоянного измерения угла и скорости.
Контроллеры полета классифицируются в основном по спецификации процессора.
Двигатели.
Есть два типа двигателей, коллекторные моторы и бесколлекторные моторы. В большинстве квадрокоптеров используются бесколлекторные двигатели, которые могут очень быстро реагировать на изменения в оборотах и требованиях к крутящему моменту. Для работы бесщеточных двигателей необходим специальный электронный регулятор скорости (ESC).
Размер бесколлекторных двигателей обозначается 4-значным числом — AABB. «AA» — ширина статора, а «BB» — высота статора или диаметр статора, оба в мм (миллиметрах). Например, Racestar BR2205 имеет статор диаметром около 22 мм и высотой около 05 мм.
По сути, чем выше статор, тем больше мощность при более высоких оборотах, и чем шире статор, тем больше крутящий момент при более низких оборотах.
Значение KV двигателя указывает скорость, с которой двигатель будет вращаться, когда вы подаете 1 вольт на его обмотки. Он определяется количеством обмоток медного провода в статоре двигателя и магнитной силой магнитов.
Меньшее количество обмоток означает меньшее сопротивление, и, соответственно, более высокие обороты. Вот почему двигатели с более высоким KV, как правило, имеют меньшую обмотку статора.
KV определяет, какой винт вы можете использовать с двигателем. Чем ниже KV, тем больший винт он может вращать, и наоборот. Нельзя увеличить подъемную силу, установив больший винт на двигатель с более высоким KV, так как требования к крутящему моменту будут выходить за пределы допустимой мощности и двигатель будет перегреваться.
Например: двигатели BR2205 2600 кВ могут работать с 5х4 дюймовыми винтами, а двигатели BR2212 1000 кВ могут работать с винтами 10х4,5 дюйма
KV ни в коем случае не является показателем выходной мощности двигателя, двигатели с более высоким KV не обязательно более мощные, чем двигатели с более низким KV.
Электронные регуляторы скорости (ESC).
Последние достижения в области мини-квадракоптеров стали возможны благодаря появлению небольших электронных регуляторов скорости, которые позволяют работать бесколекторным двигателям. Работа электронных контроллеров скорости заключается в получении сигнала дроссельной заслонки от контроллера полета и поддержании вращения двигателя на требуемой скорости.
Внутри этих небольших устройств работает целый ряд технологий, которые выходят за рамки этой инструкции. При покупке выбирайте ESC с номинальным постоянным током как минимум на 20% больше расчетной.


Пропеллеры.
Пропеллеры преобразуют механическую энергию двигателей в тягу. Размер и форма пропеллера играют огромную роль в эффективности полета.
Есть 2 типа форматов, которые используют производители: L x P x B | LLPP x B. Где, L — длина, P — шаг, B — количество лопастей.
Пропеллеры могут быть изготовлены из различных материалов, таких как пластиковый композит, углеродное волокно, дерево и т. Д. Каждый тип материала обладает уникальными характеристиками, например, углеродное волокно и дерево действительно жесткие и известны своей плавной работой, а некоторые пластики чрезвычайно долговечны. Большинство винтов, используемых в мини-квадрокоптерах, сделаны из пластиковых композитов.
Размер пропеллера, который вы можете использовать, ограничен размером вашей рамы, а также мощностью КВ вашего двигателя. Как правило, чем больше пропеллера вы можете использовать для создания определенной тяги, тем эффективнее он будет. Для мини-квадрокоптеров они варьируются между 5-6 дюймовыми винтами с шагом 4-5 дюймов.
Количество лопастей влияет на тягу и расход энергии. Чем больше лопастей, тем больше тяга и тем больше тратится энергии.
Батареи.
В настоящее время большинство беспилотных летательных аппаратов используют литий-полимерные батареи, обычно известные как батареи Lipo. Аккумулятор вместе с ESC и двигателем — это система питания квадрокоптера.
Не думайте о батарее как о резервуаре энергии, двигатели могут тянуть чудовищное количество ампер в очень короткие промежутки времени. LiPo батареи представляют собой набор ячеек, каждая из которых имеет номинальное напряжение 3.7 В. Если требуется более высокое напряжение, эти элементы могут быть соединены последовательно, чтобы сформировать одну батарею. Батареи соединенные последовательно обозначены буквой «S», а параллельно — буквой «P».
Чем больше ячеек соединены последовательно, тем выше напряжение и чем больше ячеек параллельно, тем выше емкость.
Например:
1S = 1 ячейка = 3,7 В
2S = 2 ячейки = 7,4 В
3S = 3 ячейки = 11,1 В
4S = 4 ячейки = 14,8 В
5S = 5 ячеек = 18,5 В
6S = 6 ячеек = 22,2 В
Емкость обозначается в миллиамперах или «мАч» . Это количество ампер, которое батарея может подать за один час. Например, батарея 3S 2000 мАч может обеспечить 2 А в течение 1 часа. так что, если ваш квадрокоптер тянет 20А, то его полет будет продолжаться в течение 2/20 * 60мин = 6 минут.
Номинальная разрядка обозначает максимальную скорость, с которой вы можете вытягивать ток из батареи. Он обозначается цифрой «С» сверху. Чем выше рейтинг С, тем большее количество тока может дать батарея.
Например, аккумулятор 2000 мАч 25C может выдавать до 2000×25 = 50000 мА или 50 А.
Шаг второй: проектирование и сборка каркаса
Дизайн рамы был вдохновлен формой бабочки-монархом. Когда вы смотрите на раму сверху, она выглядит как два крыла.
Мастер нарисовал дизайн в Fusion 360 и Rhino CAD. Размер рамы составляет около 230 мм, он обусловлен диагональным расстоянием от одной ступицы двигателя до другой. Самые популярные размеры рамы составляют 210 мм, 250 мм и т. д. Как только вы установили размер рамы, нарисуйте крепления для двигателя.
Центральный корпус — это место, где будет установлена вся электроника, включая контроллер полета, приемник, батарею и т. Д. В средней точке есть 4 отверстия M3 на расстоянии 30,5 мм друг от друга.
Деталь выполнена с помощью лазерной резки. Если у вас нет резака, то можно сделать резку в мастерской. Файл для резки можно скачать ниже.
Дизайн файлов.rar
Шаг третий: сборка
Теперь нужно собрать квадрокоптер.
Сначала нужно прошить контроллер прошивкой Betaflight. Затем выполнить калибровку датчика. Подключите радиомодуль и проверить его работу. Закрепить двигатели на раме в соответствии с диаграммой X-образной рамы с правильным направлением вращения. Припаять выводы двигателя к контактам ESC и закрепить ESC на кронштейне. Закрепите плату распределения питания и припаяйте контактные площадки ESC. Подключить Soler XT60 к кабелю питания, а затем к плате распределения питания. Закрепите контроллер. Подключить провода от ESC к контроллеру полета. Закрепите приемник на раме. Наденьте верхнюю крышку.
Источник
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
«Собрать большой коптер ничего о них не зная?» — да ерунда / Dronk.Ru corporate blog / Habr
Думаю все заметили, что в интернете достаточно много статей про квадрики мелкого размера: тесты, обзоры и т. д. А вот тестов больших коптеров маловато. Думаю в основном потому, что большой коптер – это чаще всего индивидуальная постройка (не всегда, но часто). Поэтому я решил написать про свой личный «самосбор» – гексакоптер на раме tarotfy680. В качестве предыстории хочу рассказать о том как я собирал этот коптер с нулевыми знаниями. За три года он претерпел много модификаций: от мелких до полной смены «тяговой начинки».
Итак, все началось когда я решил заниматься аэросъемкой. На то время у меня был куплен небольшой «шальной» квадрокоптер, на котором я научился немного летать и, как я понял позже, вообще, не годится для съемки, т. к. грузоподъемности не хватало для необходимого оборудования. В итоге пришла идея собрать свой коптер. Русскому же человеку покупать готовый дорого, и амбиций что соберет «дешевле» достаточно. 🙂
В итоге с другом «поскребли по сусекам» и нашли немного денег на покупку деталей. Все заказывал с Китая, в основном Ebay и Hobbyking. Ссылки на первые сетапы уже не найду, давно это было. И через пару месяцев ожидания (тогда почта работала хуже чем сейчас) мне выдали все посылки. Огромная рама! Огромные винты! Аккумуляторы тяжелые! Прямо восторг был после мелкого квадрика. 🙂
Итак по характеристикам первого сетапа:
Ссылку на 2х осевой подвес к сожалению не найду, но помню, что он стоил по тем деньгам 6 т. р. и был на сервах)
Итак (помните что знания нулевые) собрал все это чудо. Причем я заменил алюминиевые трубы рамы на 500мм карбоновые трубы. Амбиции о «метровом» коптере меня не покидали…
Сейчас меня пайка контактов того времени ввела бы в ужас, но всё-таки. Коптер был собран. Сделан throttlerange регуляторов (процедура, которая как я понял выравнивает мин/макс значения скорости моторов для каждого регуля) и первый запуск. В тот раз я думал что вижу гексу последний раз. Причиной тому был GPS-компас назы, который был развернут на 180 градусов. Думаю коптероводы прикинут что это такое. 🙂
Ну да ладно. После доработок, дочиток инструкций и, все же, укорочения труб до нормальной длины — новый тест. Ура! Все полетело. «Ничего себе собрал его все таки» – думал я. Даже failsafe работает. В принципе на этом радостные моменты закончились и начались «неприятки». Наконец-то купил sonynex 5nв Москве. Поставил на подвес. Взлетел и… Снимаю! Снимаю! Эм, нет не снимаю…
Коптер почему-то «проседает». Летит, летит и потом берет и плюхается в траву. Не быстро… но ведь…так не должно быть! Поднимаю повыше – летает, летает….и опять теряет высоту…. Причем бывает так, что достаточно стремительно теряет высоту. В чем дело? Все настройил, все что мог прошерстил… не хочет летать и все. Как оказалось, уже через некоторое время, эти движки лучше летают на 4s аккумах чем на 3s… но на то время я этого не знал (инструкцию же в детстве читать не научили) и поэтому: интернет, форумы.
Хм. Прошивка регулей… Ага, надо попробовать что это такое… Прошивка SimonK, ага… говорят круто, стабильно — пробуем. Не буду описывать режим прошивки, т. к. это тот еще геморрой, когда нет подходящих коннекторов. Итог был потрясающим! Вау! Стабильно висит в воздухе! Держит высоту! Камеру таскает! Но итог был потрясающим – итог был недолгим. Проба первого Failsafe. Возврат домой — ну… вернулся… с дрейфом (gps, видимо, был немного повернут), но вернулся. Хорошо.
Потом еще и назу прошил! Ведь прошивка вышла… как ее обойти. Говорят же еще лучше будет. И одним прекрасным днем….поехали полетать в поле.
«Отлети подальше» – говорили они, «все будет ништяк» – убеждали они. В конечном счете краш. Причем такой… нормальный. Карбоновый подвес в щепки (хорошо что камеру снял). Пару лучей под замену и пару пропов тоже. Шок! Почему! Из-за чего! Грешил на назу. Откат назы до заводской прошивки не помог.
На failsafe он все падал и падал. Но без него вроде летал. Конечно же, хотелось и поснимать что-то. Даже умудрился снять первый «шоурил» так сказать. И в итоге в один прекрасный день мы встали рано утром (чтоб не было людей в городе почти) и пошли поснимать городской мост. Во время запуска пару раз «проскакивали моторы», т. е. дергались и не раскручивались. Но что уж нам… зря пришли что ли? Все таки запустили его в воздух и даже что-то поснимали. Когда аккумы уже сели и я собирался снижаться и уезжать домой, на высоте около 10 метров над набережной около моста, гексакоптер решил что хочет быть квадрокоптером и просто-напросто отрубил 2 движка. Элегантно наклонясь на 90 градусов он принял курс на землю, точнее, на асфальт. Представляете вот эту картину в замедленной съемке? Летит коптер в землю, а у тебя в голове счетчик такой тикает: -20$… -50$… – 100$…
И тут, откуда ни возьмись, из-под моста еще и люди выходят. У меня волосы на голове поседели, выпали, отрасли и снова поседели. Только чудом он упал метрах в двух от них. С того момента вопрос о безопасности полетов для меня на первом месте и над людьми, вообще, стараюсь не летать. Немного отойдя от увиденного я оценил масштаб урона.
Даже микро SD-флешка сломалась пополам. 🙂
Видео не осталось на память… Какие тут съемки, когда уверенности в коптере нет? И тут я наткнулся на статью, что якобы прошивка SimonK не работает с «многополюсными» двигателями (вроде так называется).
«Етижи пассатижи» — снова подумал я. Новое скрежетание по сусекам и покупка новых регуляторов. Купил регуляторы turnigy plush 30a*. Поставил. Ого! Летает… Что-то мне еще страшно летать… Но все таки оно работало в нормальном режиме, и даже failsafe, будь он неладен. К этому времени я перешел на 4s аккумы (как надо было сделать вначале). И в момент моего счастья один человек все испортил. Он сказал что такой сетап опасный. Он может упасть завтра, через месяц, через год. Типо эти регули с такими движками не подружаться. Какие проблемы, денег-то уйма… купил двигатели T-motor 2814-10 770kvу знакомого. Так как у него с такими же регулями и винтами коптер летал, но на более длинной раме.
Все собранно и настроено. Но вот незадача, раскачивает коптер и все тут. Гейнами зажать до конца не получается. К тому времени я собирал уже свой самодельный подвес на БК моторах. (О нем расскажу в другой статье). Повесил подвес. Вес стал больше и эффект смещения центра тяжести в них сработал. Коптер стал летать нормально. Единственным минусом были полеты в ветер. Тогда его все-таки раскачивало и я нервничал. Но летал он довольно неплохо и довольно долго. Было снято несколько проектов и т. д.
После сборки квадрика на комплекте E300 от DJIя подумал о том, что хватит самодельничать, пора и гексу обновить, и купил комплект DJIe800*. Так же эта покупка предполагала переход с 4s на 6s аккумы. Посмотрев на инспайра и аналогов, понял, что на 6sдействительно будут «долгие» полеты. Такой же комплект стоит на DJIinspire 1. Получается практически шестимоторный инспайр). В таком сетапе он летает и по сей день. Коптер стал действительно стабильней, маневренней, и как ни странно тише. 🙂
Быстросъемные пропеллеры — это вообще потрясающе. Очень устал от этих закручиваний и откручиваний гаечек, ведь транспортировать со снятыми пропеллерами куда удобнее.
Единственное пришлось слегка удлинить раму. Дело в том, что этот комплект подразумевает 13-ые винты взамен моих 12-ых. И со стоковыми мотормаунтами они бы друг друга цепляли. Но покупать новую раму было б сильно затратно, поэтому просто решил поставить мотормаунты современных версий этой рамы. Купил на «хоббикинге» (вот такие) мотормаунты, которые крепятся с торца трубы, тем самым удлиняя ее примерно на 7-9 см. В итоге зазор между пропеллерами стал примерно 1,5-2 см. Сейчас коптер таскает 3х осевой подвес + sonynex 5n. На самом деле с его грузоподъемностью он спокойно вытянет и зеркалку, так как рекомендуемая нагрузка на луч 800 грамм, а максимальная 2000 граммм, просто я не считаю, что мне это сейчас надо.
Вот такая получилась история о коптеростроении с нуля. Сказать что постройка вышла дешевле чем можно было купить коптер? Конечно нет. Однако, полученный опыт стоит этих денег и времени. Да и еще к вопросу о покупке аккумуляторов. Никогда не покупайте эти желтые zippycompact! Неважно 3s или 4s — это хлам. К сравнению гекса, с t-motor 2014-10 и подвесом на них, летала 5 минут. Реально всего 5 минут! На паре аккумов в сумме 10000mah. Если и выбирать из «дешевых» аккумов, то либо простые zippyлибо turnigy. Кроме того, существенную роль играет токоотдача. На 40с коптер пролетает от 4 до 6 минут дольше чем на 25с (личный опыт).
Вывод:
1) Собрать коптер с нулевыми знаниями можно, но будьте готовы потратить на это время и деньги. Короче говоря, сначала вы приобретете знания, а потом коптер.
2) Это будет дешевле? Скорее всего нет.
3) Вы сможете гордо говорить «я сам его собрал» (из комплектующих).
4) Возможно на вопрос «сколько стоит?» вы будете отвечать «даже не знаю».
5) Приобретенный опыт поможет вам починить свой коптер в открытом поле с помощью молотка и зубила.
6) При постройке коптера вы научитесь паять, много паять, хорошо паять и в совершенстве овладеете исконно русскими ругательными фразооборотами.
На этом все. В следующей статье я продолжу тему «русских амбиций» и расскажу про строительство 3-х осевого подвеса, который сейчас установлен на этом коптере. Всем спасибо за внимание. 🙂
Дополнительные фотоИ напоследок, итоговый список составляющих моего сегодняшнего коптера:
Итого: 706,56$ за гексокоптер способный таскать зеркалку.
p.s. Спасибо Виктору за этот материал и опыт.
На этом всё, с вами был простой сервис для выбора сложной техники Dronk.Ru
Не забывайте подписываться на наш блог, будет ещё много интересного.
p.p.s. * — ссылки, отмеченные звёздочкой реферальные, так что вы можете дополнительно сэкономить, вернув кешбек до 4%. Подробнее на Dronk.ru/cashback/ или можете получить 6.5%, купив их через кешбек-сервис LetyShops.
Читайте также:
Живучие китайские смартфоны. Часть 1
Живучие китайские смартфоны. Часть 2
5 проекторов для дома
Китайские планшеты с Dual OS, для тех, кто не может сделать выбор
10 гаджетов для гиков с Gearbest со скидкой в честь дня рождения площадки
История Chuwi — от MP3-плееров в 2004 до планшетов на Windows 10 в 2016
Сравним цены на гаджеты предлагаемые GearBest на свой день рождения?
habr.com
Сборка квадрокоптера своими руками

Если вы делаете свой первый квадрокоптер, и у вас нет 3D-принтера, тогда эта инструкция для вас. На пути к построению этого квадрокоптера мастер сделал семь моделей, и у каждой были свои, существенные недостатки. Наконец он смог, путем проб и ошибок, сделать эту, работающую модель.
Инструменты и материалы:
— Фанера толщиной 7 мм и размером примерно 30 x 22 см;
— Алюминиевая профильная труба 25*25 мм — 1 метр;
-Пропеллеры размером 1045;
— Приемник и контроллер;
-Motors и ESCs x 4;
-Изолента;
-Панель управления;
-Крепеж;
-Батарея Lipo;
-Зарядное устройство;
-Провода;
-Фиксатор резьбы;
-Паяльные принадлежности;
-Разъемы XT60;
Шаг первый: корпус
Напечатайте шаблон и приклейте его на фанеру. Вырежьте детали и просверлите все отверстия.
Установите аккумулятор на основание и отбалансируйте основание. Очертите аккумулятор. Приклейте планки с трех сторон аккумулятора.
Шаг второй: рама
Разрежьте алюминиевую профильную трубу на две равные части (по 50 см). Вырежьте по середине труб два паза по 2,5 см. Просверлите по центру отверстия. Соберите крестовину и закрепите болтом.


Теперь используйте крепление двигателя, которое поставляется с ними, чтобы разметит крепежные отверстия. Просверлите отверстия. Заусеницы нужно зашлифовать.
Разметьте и просверлите крепежные отверстия для крепления корпуса к раме.

Приклейте к корпусу боковые планки.


Шаг третий: монтаж
Теперь нужно закрепить моторы на раме. На крепежные винты обязательно нужно нанести фиксатор резьбы, в противном случае, винты выкрутятся и моторы улетят.
Подключите ESC к двигателям так, чтобы верхний левый двигатель вращался по часовой стрелке, верхний правый двигатель вращался против часовой стрелки, нижний правый двигатель вращался по часовой стрелке, а нижний левый двигатель вращался против часовой стрелки. Чтобы изменить направление вращения двигателей, поменяйте местами любые два из трех проводов. Заизолируйте соединения.
Протяните провода через рамку и протяните в отверстие, ESC закрепляется внутри трубок рамки.
Соедините все черные (минус) и все красные (плюс) провода вместе. Припаяйте два провода к разъему XT60 (красный и черный). Закрепите приемник к корпусу с помощью двустороннего скотча.
Протяните провода от контроллера и приемника через отверстия в крышке отсека, затем прикрутите крышку. Прикрутите контроллер к крышке. Подсоедините провода к плате управления полетом.
Шаг четвертый: настройка
Подключите батарею и контроллер должен загрузиться. На дисплее должно появиться сообщение об ошибке. Проигнорируйте его и нажмите кнопку меню. Прокрутите вниз и нажмите «сброс настроек». Затем должно появиться меню для выбора желаемой рамы дронов. Прокрутите вниз, пока не дойдете до режима Quadcopter- X и нажмите «принять». Нажмите назад и выберите «калибровка AUX». Поместите дрон на ровную поверхность и нажмите «калибровать». Когда это будет сделано, прокрутите вверх до настроек режима и измените автоматический уровень с «AUX» на «Always».
Отключите аккумулятор, включите контроллер, а затем снова подключите аккумулятор. Контроллер полета должен включиться и показывать SAFE. Переместить left в левый угол, и дисплей должен измениться с SAFE на ARMED,
Шаг пятый: пропеллеры
Закрепите винты на валы двигателя.


Все готово. И напоследок несколько советов от мастера.
По началу квадрокоптер может показаться сложным в управлении. Лучший способ начать полет — это подняться примерно на 1 метр над землей и полетать назад и вперед, влево и вправо, а затем начать полет квадрокоптера по кругу. Квадрокоптер не любит «рыскающий» полет, поэтому учитесь плавно управлять.
Начиная летать, держите заднюю часть дрона лицом к себе, чтобы вы всегда знали.
Винты из углеродного волокна прочнее пластиковых и не так ломаются.
Источник
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
Из чего состоит квадрокоптер? Устройство дрона: обзор для новичков
Беспилотные технологии считаются чуть ли не чудом техники XXI века, хотя появились они не сегодня и не вчера. Однако именно в наше время самые разные модели дронов (воздушных и подводных) стали постепенно менять многие вещи в окружающем человека мире. Помимо военных беспилотниками стали активно пользоваться ученые, специалисты различных отраслей промышленности, пожарные, полиция, любители и профессионалы в области фото- и видеосъемки.
Огромное количество беспилотников создается не только для профессионалов, но и любителей. И если вы собираетесь вступить в быстро растущее сообщество коптероводов, то наверняка хотите побольше узнать о том, что представляет собой летательный аппарат, управляемый дистанционно, из каких компонентов он состоит и для чего они нужны машине.
 Рассмотрим основные элементы квадрокоптера на примере модели DJI Inspire 1
Рассмотрим основные элементы квадрокоптера на примере модели DJI Inspire 11. Стандартные пропеллеры
Стандартные пропеллеры отвечают за направление движения дрона и располагаются в передней части летательного аппарата. Хотя с момента появления беспилотников для изготовления пропеллеров использовались самые разные материалы, сегодня большинство серийных машин получают пропеллеры либо из пластика, либо из композитных материалов (углеволокна).
Инженеры до сих пор работают над наиболее эффективной формой пропеллеров, чтобы обеспечить стабильность полета, хорошее маневрирование и устойчивость летательного аппарата к воздействию ветра или других погодных условий. Пилоту необходимо перед каждым полетом в обязательном порядке проверять состояние пропеллеров, так как малейшее повреждение может вызвать аварию или нестабильный полет. Вот почему рекомендуется всегда иметь с собой во время полетов запасные пропеллеры.
2. Толкающие пропеллеры
Толкающие пропеллеры отвечают за передвижение летательного аппарата в воздухе вперед и назад. Название пропеллеров как раз и показывает принцип их работы. Поэтому располагаются они в задней части дрона, ведь их задачей является подавление крутящих моментов двигателя дрона во время обычного полета коптера, чтобы последний двигался либо вперед, либо назад в зависимости от команд с пульта управления.
 Низкошумные пропеллеры модели 8743 для квадрокоптеров серии DJI Mavic 2
Низкошумные пропеллеры модели 8743 для квадрокоптеров серии DJI Mavic 2 С технологической точки зрения, толкающие пропеллеры не отличаются от стандартных. Их изготавливают из пластика или композитных материалов. Они также могут иметь разные размеры в зависимости от модели дрона, а также иметь специальную защиту, которая спасет конструкцию от аварии и защитит людей от случайного касания краями винтов. Толкающие пропеллеры также необходимо постоянно проверять перед полетом на предмет их общего состояния и наличия или отсутствия повреждений.
3. Бесколлекторные двигатели
Все производимые в последнее время дроны используют бесколлекторные двигатели, которые считаются более эффективными с точки зрения производительности и эксплуатации по сравнению с коллекторными двигателями. В любом типе техники конструкция мотора не менее важна, чем все остальные компоненты, ведь эффективный двигатель не только обеспечивает отличное пилотирование (в случае с беспилотником), то сокращает ваши расходы на обслуживание и покупку дополнительного оборудования. Чем мощнее двигатель, тем больше длится время автономной работы дрона и дольше его полет. Мощность двигателя также влияет на параметры полезной нагрузки, которую может нести дрон: камера и другое оборудование.
 Различия между коллекторным и бесколлекторным двигателем
Различия между коллекторным и бесколлекторным двигателемОтличным примером является разработка компанией DJI серии своих дронов промышленного назначения: Inspire 1, Inspire 2, серии дронов Matrice и Agras. Конечно, у DJI в этом плане тоже есть конкуренты, стремящиеся выпускать летательные аппараты с мощными двигателями, однако пока китайская компания идет на шаг впереди, создавая не только мощные, но и экономичные, а также малошумные агрегаты.
4. Посадочное шасси
Наличие шасси у беспилотника не всегда обязательно. Некоторые небольшие модели сконструированы таким образом, чтобы можно было без проблем приземлиться на нижнюю панель или что-то вроде нее. Другие модели, и их большинство, оснащаются различными вариантами шасси. У кого-то они напоминают вертолетные лыжи, у других замысловатые “ножки”. Все зависит от конкретной модели, ее назначения и оснащения. Например, беспилотники, использующиеся для воздушной съемки, а значит, оборудованные подвесной камерой, как правило, получают высокое шасси с большим клиренсом. Такими шасси изначально оборудуются все модели DJI Phantom с первой до последней версии. Высокие шасси есть и у промышленных дронов линейки Matrice, также разрабатываемой DJI.
А вот у дронов серии Inspire и Mavic шасси представляют собой что-то вроде ножек, установленных под двигателями на концах “рук” рамы. При этом из-за низко расположенной камеры шасси Inspire при посадке опускаются ниже, а в полете немного поднимаются вверх, улучшая при этом обзор для камеры. У Mavic из-за особенностей расположения камеры такое решение не требуется, но зато у него шасси складываются вместе с “руками” и пропеллерами, превращая дроны этой серии в одни из самых компактных и удобных для перевозки.
 Квадрокоптер DJI Inspire 1 с поднимающимися в полете «лучами» и шасси
Квадрокоптер DJI Inspire 1 с поднимающимися в полете «лучами» и шассиНазначение дрона и возможность подвесить дополнительную полезную нагрузку под нижней панелью (например, камеру или груз), влияют на технические решения для шасси. В одних случаях они делаются фиксированными (как у той же серии Phantom), а в других случаях шасси могут убираться, предоставляя камере обзор на 360 градусов, что важно для специализированных беспилотников (для инспекции, пожаротушения, поиска и спасения и т.п.).
5. Электронные регуляторы скорости (Electronic Speed Controllers / ESC)
Электронный регулятор скорости (ESC) (другие названия: электронный регулятор скорости, электронный регулятор хода) представляет собой электрическую цепь, которая призвана контролировать скоростной режим беспилотника (впрочем, и других типов летательных аппаратов, так как это устройство в различных модификациях есть и у самолетов). По сути, это важное устройство передает энергию от батареи к двигателю бесколлекторного типа, преобразуя постоянный ток источника питания в переменный ток, который нужен мотору.
Схема работы электронного регулятора хода предполагает подачу (на входе) напряжения с батареи и поступление сигналов с полетного контроллера (бортового компьютера дрона). А вот на выходе от регулятора поступает на привод управляющее напряжение. Отсюда понятно, что регуляторы хода должны быть совместимы с полетным контроллером, когда проектируется и собирается конкретная модель беспилотника. Кроме того, они должны потреблять тока меньше, чем отдавать. Расчет же тока для привода производится, исходя из характеристик мотора и пропеллера плюс 20-30%.
О регуляторах можно рассказывать долго, а их важность для беспилотников бесспорна. Об этом говорит тот простой факт, что современные дроны полностью зависят от этого вида устройств для нормального полета и выполнения всех задач, которые ставятся перед конкретным видом летательного аппарата. Поэтому DJI и другие производители дронов на электрической тяге много работают над совершенствованием электронных регуляторов хода. При выходе каждой новой модели беспилотника DJI старается внести усовершенствования и в ESC, о чем обязательно информирует будущего потребителя, например, о снижении энергопотребления и более высокой производительности.
 Специальные регуляторы скорости для гоночных дронов DJI Takyon Z14120
Специальные регуляторы скорости для гоночных дронов DJI Takyon Z14120Где же устанавливаются электронные регуляторы ходы? Как правило, эти устройства располагают в раме летательного аппарата. У дронов DJI они, как правило, располагаются в “руках” ближе к двигателям. Многие современные модели беспилотников оснащаются достаточно продвинутыми ESC, которые могут работать в различных режимах. А это невозможно без качественного программного обеспечения (прошивки). Прошивка должна регулярно обновляться для исправления ошибок в кодах управления, а также для повышения эффективности работы устройства (снижения потребления тока и т.п.). Если вы приобретаете одну из моделей коптера бренда DJI, то вам не придется принудительно обновлять ПО, потому что при выходе новой версии прошивки, все происходит в автоматическом режиме. Поэтому вам лично не придется вносить какие-либо изменения в работу ESC.
6. Полетный контроллер
Полетный контроллер выполняет роль материнской платы или даже бортового компьютера беспилотника. Если несколько упростить его задачи, то полетный контроллер отвечает за передачу всех команд, которые пилот передает на борт дрона. А если точнее, то в задачи контроллера входит интерпретация входящих данных от ресивера (приемника), модуля GPS, монитора батареи и бортовых датчиков. Кроме этого, полетный контроллер взаимодействует с электронными регуляторами хода и тем самым следит за работой двигателя и регулировку скорости, что является частью задач по управлению коптером. Но это, разумеется, далеко не все. Любые команды — запуск и работа камеры, управление режимом автопилота и другие автономные функции, — все они направляются полетным контроллером. Как правило, пользователю не нужно вносить какие-либо изменения в работу устройства, поскольку это может негативно повлиять на характеристики беспилотника.
 Полетный контроллер DJI A3 взаимодействует с блоком IMU и системой геопозиционирования для обеспечения высокой точности данных во время пилотирования и съемки
Полетный контроллер DJI A3 взаимодействует с блоком IMU и системой геопозиционирования для обеспечения высокой точности данных во время пилотирования и съемки7. Приемник (ресивер)
Приемник — это устройство, отвечающее за прием радиосигналов, посылаемых дрону через контроллер. Для эффективного управления беспилотником необходимо минимум четыре канала. Впрочем, обычно производители рекомендуют предоставлять до пяти каналов. В целом же, сегодня на рынке представлено множество разных моделей ресиверов, как и модификаций беспилотников.
Обучающее видео по работе пультом дистанционного управления (контроллером) DJI
8. Передатчик
Передатчик — это устройство, отвечающее за передачу радиосигналов от контроллера к дрону для выдачи команд о направлении полета и других связанных с этим параметров. Как и приемник, передатчик должен иметь не менее четырех каналов для работы с беспилотником, но обычно также рекомендуется 5. Так же, как и в ситуации с ресиверами, на рынке сегодня представлено много модификаций приемников от различных производителей. Этот факт будет, скорее всего, интересен тем, кто хотел бы собрать собственный дрон, так как в случае замены устройства на моделях от DJI, используется фирменная продукция и продукция тех брендов, которые имеют партнерские отношения с китайским производителем. Приемник и передатчик должны использовать один радиосигнал для связи с дроном во время полета. Каждый радиосигнал имеет стандартный код, который помогает отличать в эфире свой сигнал от чужих.
 Последняя модель передатчика DJI Lightbridge 2
Последняя модель передатчика DJI Lightbridge 29. Модуль спутниковой навигации (GPS, ГЛОНАСС, Бэйдоу).
Многие современные беспилотники оснащаются модулями спутниковой навигации. Чаще всего это модуль GPS, однако на многих последних дронах от DJI можно встретить двойную систему навигации, которая может включать комбинации GPS и ГЛОНАСС или же GPS и Бэйдоу. В зависимости от установленной комбинации такой беспилотник может эффективно эксплуатироваться в тех или иных регионах мира. Примером может быть серия промышленных беспилотников DJI Matrice 200.
Модуль (или комбинация модулей) спутниковой навигации обеспечивает бортовой компьютер дрона данными о местонахождении аппарата (долгота, широта и высота). Подобная, достаточно сложная, система навигации необходима прежде всего специализированным беспилотникам, которые выполняют полеты на большие расстояния и/или выполняют достаточно сложные задачи в области безопасности, военные задачи или работают в сфере промышленности.
 Модуль GPS и плата IMU для DJI Mavic 2 Pro/Zoom
Модуль GPS и плата IMU для DJI Mavic 2 Pro/ZoomОднако задачи модуля спутниковой навигации вышеописанными не ограничиваются. С его помощью летательный аппарат не только ориентируется в пространстве во время полета, но и может в автоматическом режиме точно приземлиться на “базу”, даже если его визуальные датчики и штатная камера не работают, а связь с пультом дистанционного управления утеряна. Таким образом, модуль спутниковой навигации поможет обеспечить безопасность полета.
10. Батарея
Поскольку многие современные дроны летают при помощи бесколлекторных двигателей, то есть на электрической тяге, то аккумуляторная батарея является одной из основных частей дрона. Без нее невозможно запустить дрон и выполнить все поставленные полетные задачи. Впрочем, если вы управляете дроном с пульта (джойстика), то нужно помнить, что он тоже работает от своей батареи. Батарея на борту дрона чаще всего называется полетной (бортовой) и может иметь разные параметры (тип, емкость, мощность, наличие или отсутствие интеллектуальных функций и т.п.).
 Батарея с функцией самоподогрева для работы при температурах ниже 0 для дронов серии DJI Mavic 2
Батарея с функцией самоподогрева для работы при температурах ниже 0 для дронов серии DJI Mavic 2Понятно, что у разных моделей беспилотников разные требования не только к силовой установке, но и к батарее, как к источнику питания. Небольшие и любительские дроны оснащаются батареями небольших размеров с небольшой емкостью и мощностью, что в конечном итоге влияет на полетное время и рассчитанную полезную нагрузку. Для сравнения:
- DJI Spark — 1480 мА/ч — 16 минут полета
- Ryze Tello — 1100 мА/ч — 13 минут полета
- DJI Mavic Air — 2375 мА/ч — 21 минута полета
- DJI Mavic 2 Pro — 3850 мА/ч — 31 минута полета
- DJI Inspire 2 — 4280 мА/ч — 27 минут полета в зависимости от нагрузки
- DJI Phantom 4 V2.0 — 5870 мА/ч — 30 минут полета
Специализированные (промышленные дроны и платформы) требуют более емкой и мощной батареи ввиду сложности и большого объема решаемых задач. Отсюда и иные параметры источников питания, а также вытекающие отсюда полетное время и вес полезной нагрузки. Для сравнения:
- DJI Matrice 100 — 4500 мА/ч (дополнительная 5700 мА/ч) — в зависимости от полезной нагрузки и количества батарей время полета и зависания от 20 до 40 минут
- DJI Matrice 600 Pro — 4500 мА/ч (дополнительная 5700 мА/ч) — в зависимости от полезной нагрузки и количества батарей время полета и зависания до 38 минут
Компания DJI, как и ее конкуренты, постоянно ведет исследования в области совершенствования полетных аккумуляторов. Например, мониторинг состояния батареи сегодня стал уже довольно обычным явлением. Теперь пилот вовремя узнает не только об уровне заряда батареи, но и сможет получить информацию о том, когда следует вернуть беспилотник на базу, чтобы он не потерпел аварию из-за полного разряда батареи. Кроме того, DJI стала выпускать специальные аккумуляторы с подогревом, позволяющие эксплуатировать ее дроны при низких температурах, что ранее было просто невозможно.
11. Камера
В этом отношении наблюдается некоторое разнообразие. Если первые дроны поставлялись без камер и в лучшем случае имели некоторые аксессуары для крепления обычных камер, используемых на земле, то теперь ситуация изменилась. Часть дронов поставляется во встроенной камерой (яркий пример: серия Mavic, Spark, Ryze Tello). В других случая беспилотник может быть оборудован подвесной камерой, которую можно снимать (и даже устанавливать другие совместимые) или же вы можете купить коптер без камеры, к которому можно позже докупить штатную подвесную камеру. Преимущества аппаратов с камерами очевидны, ведь тогда они превращаются в “летающие камеры”, с помощью которых можно вести как любительскую, так и профессиональную съемку с воздуха.
Фильм «Riders», снятый с помощью квадрокоптера DJI Inspire 2 и подвеса с камерой DJI Zenmuse X7, — один из ярких примеров динамичной воздушной съемки
blog.4vision.ru
Что нужно знать, чтобы собрать дрон своими руками
Квадрокоптер можно приобрести практически в любом крупном интернет-магазине, или сделать дрон своими руками. Неизвестно, что появилось раньше: массовое производство коптеров или первыми были попытки радиолюбителей создать дрон самостоятельно. Но тот факт, что это увлечение становится популярным среди любителей радиоуправляемых устройств, не может оставить равнодушным ни одного моделиста и коллекционера квадрокоптеров.
Содержание
Модель квадрокоптера «Сделай Сам»
Купить или сделать?
Детали, процесс сборки, нюансы

Модель квадрокоптера «Сделай Сам»
Многие пользователи дронов задаются вопросом — как собрать квадрокоптер собственными руками. Скорее это желание происходит от стремления получить полный контроль над полетом и управлением процесса съемки.
В самостоятельной сборке коптера есть ряд преимуществ: во-первых, это возможность создать аппарат с теми параметрами, которые вам нужны. Во-вторых, такое устройство легче кастомизировать, всегда можно приделать новые детали или заменить, например, аккумулятор и поставить более мощный источник питания. В-третьих, это может послужить интересным опытом и стать первым шагом к новому увлечению.
 Из отрицательных сторон можно подчеркнуть то, что такая сборка может потребовать много времени на поиск нужных деталей, изучение всей технической части. Тем более никто не сможет дать гарантии, что «первый блин не пойдёт комом». Хотя с другой стороны, сейчас существует большое количество специализированных магазинов для радиотехники, а понять принципы устройства и работы квадрокоптера помогут многочисленные схемы на примере готовых моделей самодельных версий.
Из отрицательных сторон можно подчеркнуть то, что такая сборка может потребовать много времени на поиск нужных деталей, изучение всей технической части. Тем более никто не сможет дать гарантии, что «первый блин не пойдёт комом». Хотя с другой стороны, сейчас существует большое количество специализированных магазинов для радиотехники, а понять принципы устройства и работы квадрокоптера помогут многочисленные схемы на примере готовых моделей самодельных версий.
Также многие прибегают к моделированию дронов из того расчёта, что это может обойтись гораздо дешевле, чем покупка брендового устройства. Но и здесь многое зависит от того, с какими характеристиками аппарат вы хотите получить, и важен ли для вас внешний вид квадра. Тем более частые модификации, которые помогут сделать дрон более функциональным, тоже могут влиться «в копеечку».
Изобретатель Джаспер ван Ленен в 2013 году представил набор для тех, кто хочет собрать дрон самостоятельно. В чемоданчике у него было всё самое необходимое: электроника, моторчики, радиоприёмник, детали корпуса. Все пластмассовые детали были распечатанные на 3D принтере.
Купить или сделать?
Решение сделать коптер самим может быть определёно, так называемым, спортивным интересом, а может быть связано и с желанием сэкономить. И в первом, и во втором случае важно взвесить все «за» и «против», а также определить сильные и слабые стороны в самостоятельной сборке.
Время
Как было сказано выше, основным минусом дрона «Сделай Сам» может стать время. Ведь одно дело -заказать готовый к полёту квадр, подождать одну-две недели и использовать его в своё удовольствие. А вот в самостоятельной сборке есть целый ряд нюансов, которые могут повлиять на сроки:
- Приобретение всех необходимых запчастей, которые не всегда могут попасть к вам в руки одновременно.
- Время потребуется и на изучение технической части, чтобы ясно понимать из чего состоит и как работает дрон.
- Сама сборка и настройка полётного контроллера потребует времени и, конечно, терпения.
- Постсборка, которая означает не только тестирование, но работу над ошибками и «переделками», что также занимает много времени и сил.
Опыт
Компенсировать первый пункт во многом сможет наличием опыта в самостоятельной сборке радиоуправляемых устройств. К тому же, если вы собираете дрон при наличии «заводской» модели, то это может стать наглядным пособием для изучения «начинки» квадра. А вот для тех, кто первый раз сталкивается с такой сборкой, есть два варианта:
 А) Приобрести самую недорогую модель квадрокоптера, которая не только послужит образцом, но и чьи детали можно позаимствовать для своего коптера;
А) Приобрести самую недорогую модель квадрокоптера, которая не только послужит образцом, но и чьи детали можно позаимствовать для своего коптера;
Б) Обратиться за помощью на форумы и специализированные сайты, где можно почерпнуть всю информацию, а также подробно прочитать о пошаговой сборке коптера с указанием наименований всех необходимых деталей.
Стоимость
Многие решают собрать квадрокоптер из расчёта, что такое устройство обойдётся дешевле покупного. Но здесь следует помнить о некоторых особенностях:
- Конечно, если вы ставите цель собрать квадрик из подручных средств с минимальными затратами, то проблем не возникнет, так как можно приобрести все комплектующие из одного ценового диапазона. Но тут нужно понимать, что создать мощное устройство с высокой грузоподъемностью вам не удастся.
- Если же вы делаете ставку на характеристики квадрокптера, а не на простую возможность взлетать и парить в воздухе несколько минут, то здесь вы вряд ли добьетесь существенной разницы между покупным и самодельным коптером. Хотя, конечно, возможность сохранить 10-20% от стоимости всё же будет.
Самостоятельная сборка квадро-, гекса- или трикоптера — это возможность попробовать себя в роли инженера и механика, позволяющая создать уникальную модель с теми характеристиками, которые для вас являются наиболее актуальными. Но питать надежды, что это более простой и дешёвый путь, чем покупка готового устройства, всё же не стоит.

Детали, процесс сборки, нюансы
Итак, вы решили создать свой первый квадрокоптер. Для начала лучше всего обратиться к опыту «бывалых» конструкторов. Здесь на помощь придут различные форумы, сайты, видео-«лайфхаки».
Любой дрон состоит из двух основных частей — это сам механизм, который запускает его, и каркас, на котором крепится эта «начинка». Для того чтобы коптер полетел нужны:
- Полетный контроллер;
- Батарея;
- Моторы и пропеллеры, которые к ним крепятся;
- Регуляторы скорости;
- Сервопровод для создания поворотного механизма;
- А также различные расходники: шурупы, разъемы, антивибрационная губка, клей, эластичная лента.
Каркас может быть вырезан из фанеры или из прочного пластика, его форма во многом определяет и тип дрона: будет ли это три-, квадро- или гексакоптер. Он представляет собой основную раму, на которую крепится контроллер и аккумулятор, и лучи с моторами, поворотным механизмом и конструкцией для регулятора скорости. Лучше всего, если лучи будут подвижными, особенно в случае, когда вы собираетесь делать большой квадрокоптер, тогда впоследствии не возникнет проблем с транспортировкой.
Создание своего квадрокоптера — это возможность попробовать себя в роли инженера и дизайнера. Коптеру можно придать самую разную форму, используя как готовый каркас, так и самодельный, попробовать оснастить его дополнительными конструкциями, которые будут помогать переносить различные предметы на борту.
Если коптер будет использоваться для аэросъёмки, то следует позаботиться и о наличии подвесов для камеры. От мощности моторов и размеров пропеллеров будет зависеть грузоподъёмность устройства. Этот факт особенно важно учитывать, если речь идёт о тяжёлых цифровых или полупрофессиональных камерах.
Настройка полётного контроллера происходит через ПК, на который предварительно нужно установить специальную программу для MultiWii или Arduino, в зависимости от модели купленного контроллера. И, конечно же, чтобы вы могли управлять и ловить сигнал от вашего коптера нужно будет приобрести радиопередатчик, например, DSM2.
Какую характеристику Вы бы хотели улучшить в квадрокоптерах?

infocopter.ru
Как сделать Дрон своими руками

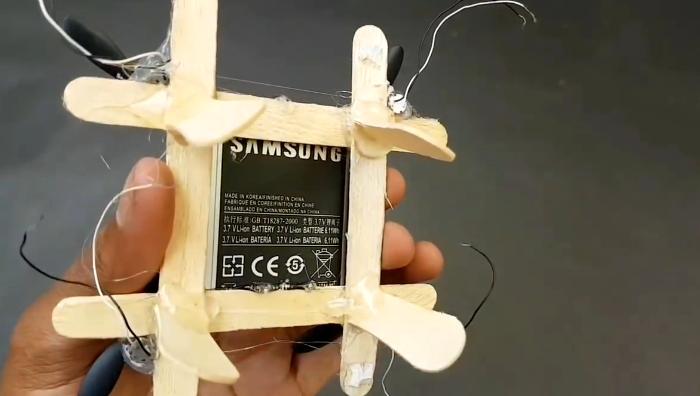
Мини дрон — квадрокоптер на дистанционном управлении можно очень просто сделать дома. Использовать его можно для игр и как макет для изучения работы дрона. Конструкция содержит минимальное количество деталей, а на постройку уйдет 15 минут времени или чуть более.
Наша простая модель не имеет ни регулировку скорости вращения двигателей, ни изменения направления полета. Она не умеет практически ничего, кроме того как подниматься в воздух вверх и опускаться по нажатию кнопки. Но если вы хотите, то вы можете в дальнейшем собрать более серьезный вариант и доработать всеми возможностями какими хотите.
Понадобится для сборки Дрона
А также: палочки от мороженного, пистолет с горячим клеем, паяльник с припоем и флюсом.
Подробнее о деталях для сборки квадрокоптера
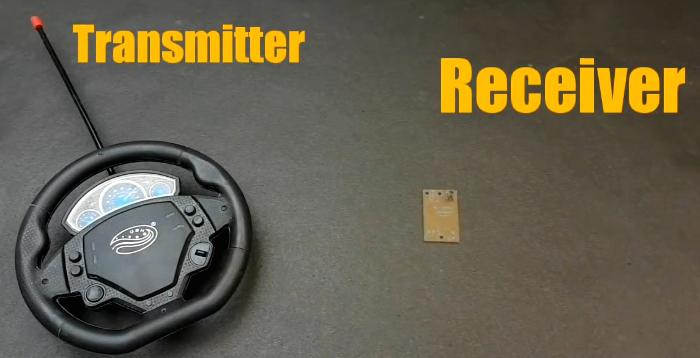
Пульт с приемником для дистанционного управления можно позаимствовать из игрушки, к примеру из сломанной машинки или купить — Али Экспресс. Главным условием должно быть то, чтобы вся электроника исправно работала от напряжения 3,7 В.
Аккумуляторная батарея 3,7 В взята от старого мобильного телефона, ее так же можно приобрести — Али Экспресс. Там можно выбрать еще гораздо меньшие варианты.

Мини двигатели для летающих моделей можно купить — Али Экспресс.

Пропеллеры так же придется приобрести — Али Экспресс. Они должны подходить к двигателям. Так что лучше их взять вообще комплектом — тут на Али.

Изготовление Дрона — квадрокоптера
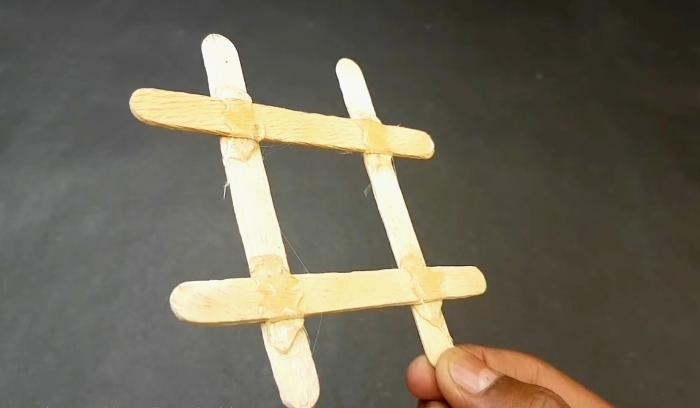
Итак, первым делом соберем такую решетку из четырех палочек для мороженного. Фиксируем все горячий клей. Это будет основная рама нашего мини квадрокоптера.
Аккумулятор приклеиваем таким же способом к раме.
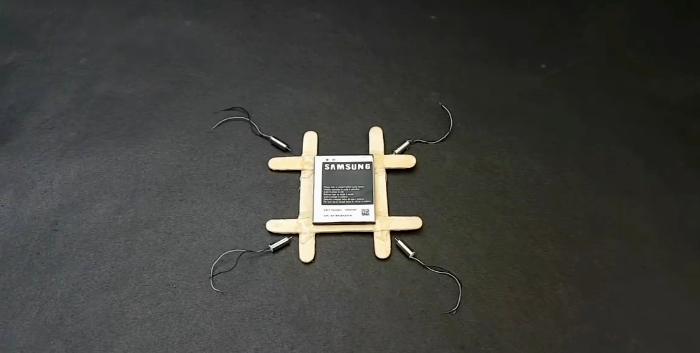
Приклеиваем четыре двигателя с пропеллерами в углы решетки.

Теперь нужно сделать ножки, на которых будет стоять дрон. Разрежем две палочки от мороженного пополам.

Прикрепим к основанию.
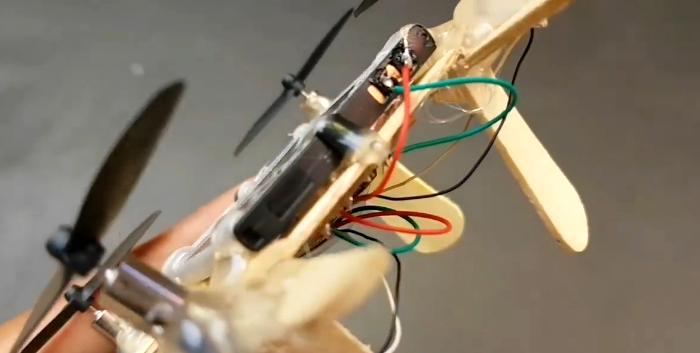
Добавляем приемную плату ДУ. Вывода всех двигателей соединим параллельно.
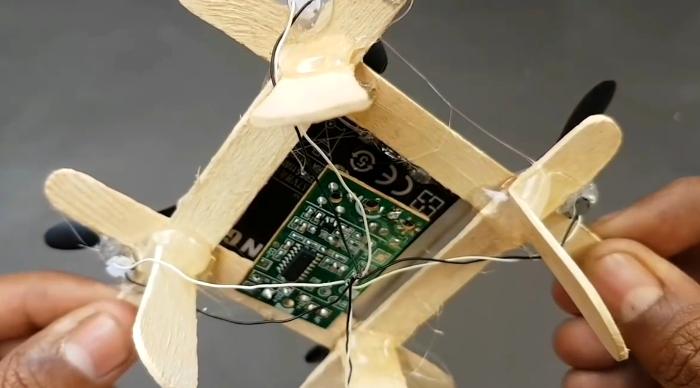
Подключаем провода двигателей к выходу платы ДУ.

Подключаемся к аккумуляторной батареи.
Проверка. Удерживаем дрон от подъема и нажимаем на кнопку пульта ДУ. Если пропеллеры всех четырех двигателей закрутились — все работает исправно.
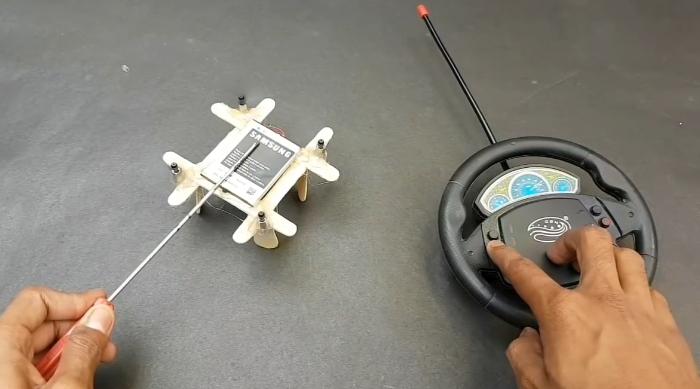
Выходим на открытую местность, ставим наш квадрокоптер и проверяем работу. Дрон должен взлететь в верх без особых проблем.

Если пропеллеры закрутились, а конструкция не взлетела, проверьте уровень заряда аккумулятора. Если все в норме, нужно облегчить конструкцию. В принципе, мощности таких четырех мотором должно хватить с запасом.
Во время постройки рекомендую как можно больше экономить общий вес, чтобы дрон был максимально легок. Так что лейте меньше клея, отрезайте максимально короткие провода и т.п.
Смотрите видео
Более подробную инструкцию по сборке игрушки смотрите в видео.
sdelaysam-svoimirukami.ru