Как сделать своими руками дрон на Ардуино Уно
Дрон — очень дорогой гаджет. Как собрать квадрокоптер самому в домашних условиях? В этой инструкции я собираюсь рассказать, как сделать своими руками квадрокоптер по дешевке. Рама коптера и контроллер полета — самодельные. Конструкция сборки доступна даже для начинающих.
Рама состоит из алюминиевой антенны (штанги), лопасти вентилятора из алюминиевого плафона и дерева. Arduino UNO наряду с MPU6050 (гироскоп + Accle) используется в качестве контроллера полёта.
Шаг 1: Материалы
Показать еще 11 изображений
Это материалы, которые используются для моего дрона. Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Ссылки на Амазон:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.
 1v, лучше взять эту
1v, лучше взять эту - Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Макетная плата
- Коннетор XT60
- Передатчик и ресивер
- устройство для контроля напряжения Li-Po
Список со ссылками на banggood:
- Передатчик и ресивер
- Бесщеточный двигатель
- 30 Amp ESC
- Li-Po батарейка
- Зарядное устройство Li-Po
- Контроллер напряжения Lipo
- Arduino uno
- MPU6050
- XT60 коннектор
- Пропеллер 1045
Ссылки на gearbest:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v
- Контроллер напряжения Lipo
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Коннетор XT60
- Вентильный двигатель CW
- Вентильный двигатель CCW
- 4*30Amp ESCs
- Пропеллер 1045
- Термоусадочная трубка
Шаг 2: Установка моторов
Когда вы покупаете моторы, крепление мотора и несколько винтов входят в комплект. Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Шаг 3: Делаем раму
Показать еще 3 изображения
Я использую старую алюминиевую антенну, мягкое дерево и алюминиевую пластину (лопасть вентилятора), чтобы сделать каркас. Отрежьте 4 куска алюминиевого бруска по 20см. Размер центральной пластины составляет около 11 * 18 см…. Деревянное крепление для двигателя имеет длину около 10 см и диаметр 4,5 см (там, где установлен двигатель).
Закрепите алюминиевые стержни с помощью центральной пластины с помощью винтов и вставьте крепление двигателя под алюминиевые стержни. Ваша рама готова (см. видео).
Шаг 4: Устанавливаем все компоненты (ESC и моторы на раму)
Показать еще 4 изображения
Теперь прикрепите моторы к деревянному креплению с помощью винтов и гаек (любых типов) и соедините с ними провод ESC (произвольно), зафиксируйте ESC с помощью изоленты или стяжек, в моем случае это изолента (дешевле, чем стяжки). После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
Шаг 5: Контроллер полёта
Показать еще 4 изображения
На основе Ардуино Уно и MPU6050, создайте контроллер полёта.
Мой контроллер основан на Joop Brokking’s YMFC-AL и его автоуровневом квадрокоптере. Соедините все согласно диаграмме.
Шаг 6: Соединяем ESC и ресивер с контроллером полёта
*** Не соединяйте BEC-провод ESC (5 вольт), соединяйте лишь сигнальный провод
*** Запитывайте ресивер от 5вольтового источника Ардуино
Соединение ESC:
- Цифровой пин-4 к ESC1 (правый передний CCW)
- Цифровой пин-5 к ESC2 (правый задний CW)
- Цифровой пин-6 к ESC3 (левый задний CCW)
- Цифровой пин-7 к ESC4 (левый передний CW)
Соединение ресивера:
- Цифровой пин-8 к каналу 1 ресивера
- Цифровой пин-9 к каналу 2 ресивера
- Цифровой пин-10 к каналу 3 ресивера
- Цифровой пин-11 к каналу 4 ресивера
Шаг 7: Настройка контроллера полёта (загрузка скетча)
Показать еще 4 изображения
*** На этом этапе не подключайте лётную батарею
Теперь загрузите Arduino IDE и приложенный скетч и извлеките файл. Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Arduino IDE
Скетч контроллера полета
Сначала загрузите код и откройте последовательный монитор на 56000b и следуйте инструкциям в видео
Если ошибки не возникло, загрузите скетч калибровки ESC после загрузки кода. Поставьте передатчик на полную мощность и подключите летную батарею после нескольких звуковых сигналов, выключите дроссель (я думаю, что этот метод работает не для всех типов и марок ESC, но у меня это работает отлично).
После загрузки скетча калибровки ESC загрузите скетч контроллера полета и Ваш FC готов.
Файлы
- YMFC-AL.zip
Шаг 8: Установка электроники в кейс и монтаж
Показать еще 11 изображений
После завершения всех работ по соединению электрокомпонентов, положите всю электронику в коробку и завершите всю проводку. Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Самое сложное в создании этого квадрокоптера — настройка PID. Я сломал 2 пары пропеллеров и коробку с электроникой, пытаясь научиться летать на ней.
Как сделать своими руками дрон на Ардуино Уно
Дрон — очень дорогой гаджет. Как собрать квадрокоптер самому в домашних условиях? В этой инструкции я собираюсь рассказать, как сделать своими руками квадрокоптер по дешевке. Рама коптера и контроллер полета — самодельные. Конструкция сборки доступна даже для начинающих.
Рама состоит из алюминиевой антенны (штанги), лопасти вентилятора из алюминиевого плафона и дерева. Arduino UNO наряду с MPU6050 (гироскоп + Accle) используется в качестве контроллера полёта.
Шаг 1: Материалы
Показать еще 11 изображений
Это материалы, которые используются для моего дрона. Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Ссылки на Амазон:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v, лучше взять эту
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Макетная плата
- Коннетор XT60
- Передатчик и ресивер
- устройство для контроля напряжения Li-Po
Список со ссылками на banggood:
- Передатчик и ресивер
- Бесщеточный двигатель
- 30 Amp ESC
- Li-Po батарейка
- Зарядное устройство Li-Po
- Контроллер напряжения Lipo
- Arduino uno
- MPU6050
- XT60 коннектор
- Пропеллер 1045
Ссылки на gearbest:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v
- Контроллер напряжения Lipo
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Коннетор XT60
- Вентильный двигатель CW
- Вентильный двигатель CCW
- 4*30Amp ESCs
- Пропеллер 1045
- Термоусадочная трубка
Шаг 2: Установка моторов
Когда вы покупаете моторы, крепление мотора и несколько винтов входят в комплект. Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Шаг 3: Делаем раму
Показать еще 3 изображения
Я использую старую алюминиевую антенну, мягкое дерево и алюминиевую пластину (лопасть вентилятора), чтобы сделать каркас. Отрежьте 4 куска алюминиевого бруска по 20см. Размер центральной пластины составляет около 11 * 18 см…. Деревянное крепление для двигателя имеет длину около 10 см и диаметр 4,5 см (там, где установлен двигатель).
Закрепите алюминиевые стержни с помощью центральной пластины с помощью винтов и вставьте крепление двигателя под алюминиевые стержни. Ваша рама готова (см. видео).
Шаг 4: Устанавливаем все компоненты (ESC и моторы на раму)
Показать еще 4 изображения
Теперь прикрепите моторы к деревянному креплению с помощью винтов и гаек (любых типов) и соедините с ними провод ESC (произвольно), зафиксируйте ESC с помощью изоленты или стяжек, в моем случае это изолента (дешевле, чем стяжки). После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
Шаг 5: Контроллер полёта
Показать еще 4 изображения
На основе Ардуино Уно и MPU6050, создайте контроллер полёта.
Мой контроллер основан на Joop Brokking’s YMFC-AL и его автоуровневом квадрокоптере. Соедините все согласно диаграмме.
Шаг 6: Соединяем ESC и ресивер с контроллером полёта
*** Не соединяйте BEC-провод ESC (5 вольт), соединяйте лишь сигнальный провод
*** Запитывайте ресивер от 5вольтового источника Ардуино
Соединение ESC:
- Цифровой пин-4 к ESC1 (правый передний CCW)
- Цифровой пин-5 к ESC2 (правый задний CW)
- Цифровой пин-6 к ESC3 (левый задний CCW)
- Цифровой пин-7 к ESC4 (левый передний CW)
Соединение ресивера:
- Цифровой пин-8 к каналу 1 ресивера
- Цифровой пин-9 к каналу 2 ресивера
- Цифровой пин-10 к каналу 3 ресивера
- Цифровой пин-11 к каналу 4 ресивера
Шаг 7: Настройка контроллера полёта (загрузка скетча)
Показать еще 4 изображения
*** На этом этапе не подключайте лётную батарею
Теперь загрузите Arduino IDE и приложенный скетч и извлеките файл.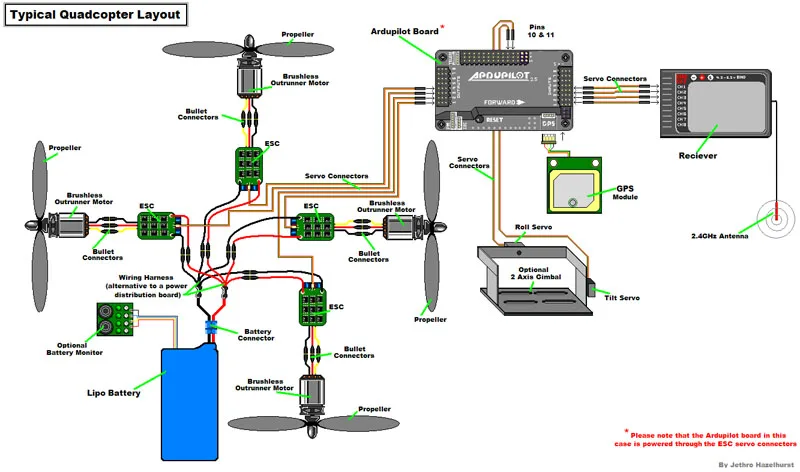 Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Arduino IDE
Скетч контроллера полета
Сначала загрузите код и откройте последовательный монитор на 56000b и следуйте инструкциям в видео
Если ошибки не возникло, загрузите скетч калибровки ESC после загрузки кода. Поставьте передатчик на полную мощность и подключите летную батарею после нескольких звуковых сигналов, выключите дроссель (я думаю, что этот метод работает не для всех типов и марок ESC, но у меня это работает отлично).
После загрузки скетча калибровки ESC загрузите скетч контроллера полета и Ваш FC готов.
Файлы
- YMFC-AL.zip
Шаг 8: Установка электроники в кейс и монтаж
Показать еще 11 изображений
После завершения всех работ по соединению электрокомпонентов, положите всю электронику в коробку и завершите всю проводку. Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Самое сложное в создании этого квадрокоптера — настройка PID. Я сломал 2 пары пропеллеров и коробку с электроникой, пытаясь научиться летать на ней.
Узнайте, как собрать свой собственный дрон-квадрокоптер
Дроны существуют уже некоторое время, но в последнее время они становятся все более и более популярными. Заполучить достаточно мощный дрон теперь проще, чем когда-либо. В то время как цены снижаются, и вы можете отправиться в местный магазин, чтобы купить дрон с видеокамерой за несколько сотен долларов, многим все еще чего-то не хватает в этом опыте.
Зачем покупать полнофункциональный дрон, если вы можете применить свои инженерные способности, создав свой собственный полнофункциональный дрон? Давайте подробнее рассмотрим, что требуется для создания собственного дрона-квадрокоптера, а также что необходимо для его программирования, чтобы сделать его полностью функциональным.
Что вам понадобится для сборки вашего дрона
На рынке есть наборы для дронов, которые значительно упрощают задачу по сборке вашего собственного дрона. Тем не менее, независимо от того, работаете ли вы с универсальным набором для квадрокоптера или строите дрон полностью с нуля, вам понадобятся эти детали и шаги, которые вам нужно будет предпринять.
Рама — это то, что скрепит ваш дрон и сделает его долговечным. Вы можете выбрать готовые рамы для квадрокоптера, которые можно найти в магазинах для хобби в Интернете, или вы можете создать свою собственную раму из материалов, которые вы заказываете. Чтобы построить свою собственную раму, вам потребуются некоторые инженерные знания в области авиационного дизайна и легкие, но прочные материалы, которые вы можете использовать для конструкции. Вы также можете использовать вырез из деревянной доски толщиной примерно 2,5 сантиметра.
СВЯЗАННЫЕ: СОЗДАЙТЕ СВОЙ ДРОН ИЛИ МАШИНУ НА УПРАВЛЕНИИ С ЭТИМ КОМПЛЕКТОМ 2-В-1
Двигатели будут иметь решающее значение для определения того, как ваш дрон будет работать и летать. Выбор правильных двигателей может решить или помешать успеху вашего окончательного проекта дрона. С двигателями вам придется учитывать, насколько быстро они могут работать, обороты в минуту и сколько энергии они будут потреблять для этого. Выбор двигателей влияет на то, насколько тяжелой может быть ваша рама, насколько большой должна быть ваша батарея и, в конечном счете, как долго вы можете держать свой дрон в полете.
Выбор правильных двигателей может решить или помешать успеху вашего окончательного проекта дрона. С двигателями вам придется учитывать, насколько быстро они могут работать, обороты в минуту и сколько энергии они будут потреблять для этого. Выбор двигателей влияет на то, насколько тяжелой может быть ваша рама, насколько большой должна быть ваша батарея и, в конечном счете, как долго вы можете держать свой дрон в полете.
Самые популярные
Электронные блоки управления скоростью также понадобятся для индивидуального управления каждым из ваших двигателей. Вам потребуется такое же количество ESC для вашего дрона, как и у вас есть оружие, поэтому для квадрокоптера потребуется 4. дополните свои пропеллеры двигателями, к которым они будут прикреплены.
Разъемы 3,5 мм потребуются для подключения моторов к регулятору скорости и, вероятно, разъемы 4,5 мм для платы питания.
Аккумулятор и плата распределения питания станут источником питания для вашего дрона. Плата соединяет ESC с батареями, а батареи обеспечивают питание. Вы также захотите взять блок мониторинга батареи, чтобы вы могли передавать заряд батареи от дрона к вашему контроллеру.
Плата соединяет ESC с батареями, а батареи обеспечивают питание. Вы также захотите взять блок мониторинга батареи, чтобы вы могли передавать заряд батареи от дрона к вашему контроллеру.
Монтажная площадка поможет уменьшить вибрации, с которыми сталкивается дрон, что придаст вам большую устойчивость в воздухе. Если вы пытаетесь установить камеру на дрон, вам обязательно понадобится монтажная площадка.
Контроллеры и радиоуправляемый приемник составляют основу дистанционного управления вашим самодельным дроном. Вам понадобится настраиваемый контроллер дрона и радиоуправляемый приемник для установки на дрон.
Дополнительные элементы для вашей сборки: камера и запоминающее устройство . Если вы планируете построить дрон с камерой, то, очевидно, вам понадобятся эти компоненты, чтобы это произошло.
Базовый процесс сборки дрона своими руками
Первым шагом к созданию собственного дрона является создание каркаса дрона. Независимо от того, работаете ли вы с комплектом или нет, вы должны убедиться, что рама дрона находится на завершающей стадии разработки, прежде чем вы начнете переходить к следующей части, то есть к установке двигателей и электронных блоков управления.
Независимо от того, работаете ли вы с комплектом или нет, вы должны убедиться, что рама дрона находится на завершающей стадии разработки, прежде чем вы начнете переходить к следующей части, то есть к установке двигателей и электронных блоков управления.
СВЯЗАННЫЕ: ЭТО ВИДЕО О СБОРКЕ ГЕКСАКОПТЕРА ПРИГОВОРИТ ВАМ СОБИРАТЬ СВОЙ САМЫЙ ДРОН
После того, как ваша рама будет завершена, вы перейдете к установке двигателей на концах рычагов рамы, а также к установке ESC. Как мы упоминали в части списка деталей этой статьи, вы должны обратить внимание на двигатели, пропеллеры и ESC, которые все работают вместе, чтобы процесс сборки прошел гладко.
Перед установкой двигателей необходимо просверлить отверстия в раме, идеально совпадающие с отверстиями для крепежных винтов двигателей. После этого приступайте к установке двигателей на место.
После того, как двигатели установлены, вы можете установить регуляторы скорости. Вы захотите установить эти устройства в нижней части рамы, чтобы сбалансировать вес дрона после того, как все будет собрано. В дронах, сделанных своими руками, вы, вероятно, в конечном итоге будете использовать маленькие стяжки или легкий клей для крепления регуляторов.
В дронах, сделанных своими руками, вы, вероятно, в конечном итоге будете использовать маленькие стяжки или легкий клей для крепления регуляторов.
После того, как двигатели и регуляторы скорости установлены, приступайте к разработке шасси, которое защитит дрон при любой посадке в будущем. Шасси должно быть изготовлено из материалов, гибких, но прочных и устойчивых к ударным нагрузкам.
Теперь вы готовы установить и запрограммировать систему управления полетом. Это то, что будет управлять двигателями дрона и делать его устойчивым в воздухе. У вас есть два варианта: купить готовый контроллер для дронов или собрать его самостоятельно.
Покупка готового к использованию контроллера, очевидно, является более простым шагом, без программирования или устранения неполадок после сборки физического дрона. Если вы решите создать свой собственный контроллер дрона, вам нужно будет найти несколько довольно подробных руководств, которые проведут вас через этот процесс. Будет задействовано приличное количество кода, и если вы еще не знаете, что нужно для идеального управления дронами, то вам придется пройти крутую кривую обучения.
Наконец, установка полетного контроллера на дрон — это последний этап сборки собственного дрона. Вы захотите установить его в центре дрона достаточно прочно. Прежде чем загружать все и калибровать дрон, убедитесь, что все правильно зафиксировано. Калибровка дрона на самом деле не работает, если после того, как вы закончите, все просто сместится в новые места.
Наконец, после сборки дрона вам нужно будет протестировать его и убедиться, что все работает именно так, как вы хотите. Вы захотите провести несколько экспериментов, проверяя элементы управления и реакцию дрона, пока он еще находится на земле, чтобы этот процесс не закончился поломкой вашего самодельного дрона.
Для вас
Инновация
Стартап 23-летнего Картика Ратинама Out Of The Box создает прочную, водостойкую и прочную мебель из картона. Он рассказывает IE о своих экологически чистых продуктах.
Дина Тереза | 17.08.2022
инновацииЭксперт: Система управления зданием может сократить выбросы и повысить экологичность
Амейя Палеха| 22.02.2023
наукаУченые наконец разгадали тайну «волосоподобных» структур, обнаруженных почти во всех клетках человека
Саде Агард| 24.10.2022
Еще новости
Инновации
Puma представляет футбольные бутсы KING, полностью не содержащие животных
Интересное проектирование| 04.03.2023
Инновации
У вашего любимого капитана «Звездного пути» Стюарта новая миссия: покончить с глобальным мусорным кризисом
Интересная инженерия| 04.03.2023
инновации
Инженеры мексиканской компании 3D-печатные кирпичи из яичной скорлупы
Лукия Пападопулос | 04.03.2023
Как построить дрон | Пошаговые инструкции
Итак, вы хотите построить свой собственный дрон, а не покупать его. Не бойся; мы создали руководство, которое проведет вас через все, что вам нужно, и каждый шаг, который вам нужно сделать, чтобы построить свой дрон и поднять его в воздух.
Не бойся; мы создали руководство, которое проведет вас через все, что вам нужно, и каждый шаг, который вам нужно сделать, чтобы построить свой дрон и поднять его в воздух.
Прежде всего, вот подробный список всего, что вам нужно для начала работы.
Если вас больше интересуют дроны с видом от первого лица, ознакомьтесь с нашим руководством по сборке собственного дрона с видом от первого лица.
Необходимые элементы для сборки собственного дрона
Рама:
Рама — это основа вашего дрона. У вас есть возможность либо построить его самостоятельно, либо купить раму у продавца.
Рама также имеет решающее значение для размеров вашего дрона; количество рычагов у вашей рамы будет определять, сколько моторов вам понадобится. Квадрокоптеры, беспилотники с четырьмя двигателями, безусловно, самые популярные.
Другое измерение вашего дрона — размер; размеры рамы указывают самое дальнее расстояние, на котором два двигателя находятся друг от друга.
Двигатели:
Двигатели дронов делятся на два основных типа: щеточные и бесщеточные. Мы рекомендуем бесщеточные двигатели.
Несмотря на то, что они более дорогие, они также служат дольше, имеют меньше поломок и потребляют меньше энергии, а значит, больше времени в эфире.
ESC или электронный регулятор скорости:
Неотъемлемая часть вашего дрона, так как он подает электроэнергию от аккумулятора к вашим двигателям. Вам понадобится по одному для каждого двигателя вашего дрона.
Пропеллеры:
При покупке пропеллеров вам нужно найти те, которые подходят к раме и двигателям вашего дрона.
Когда вы создаете свой собственный дрон, вы должны убедиться, что все работает вместе.
Распределительный щит:
Здесь подключаются основные электрические компоненты. Аккумулятор прикреплен к плате распределения питания, откуда электродвигатели и регуляторы получают питание.
Разъемы:
Разъемы необходимы для сварки двигателей и ESC друг с другом и с распределительным щитом.
Контроллер полета:
Контроллер полета — это аппаратный узел вашего дрона. Здесь вы подключаете такие вещи, как ESC, вход RC, GPS, телеметрия и многие другие компоненты, которые вы можете подключить к своему дрону. По сути, это мозг вашего дрона.
Обычно они оснащены гироскопом и акселерометром, которые автоматически помогают балансировать дрон.
Контроллеры полета управляются их прошивкой, которая может быть либо с закрытым исходным кодом, где вы не можете видеть код или вносить изменения, либо с открытым исходным кодом, где вы можете вносить свои модификации.
Аккумуляторы:
При покупке аккумуляторов необходимо снова учитывать емкость и тип аккумулятора, чтобы он подходил для вашего дрона. Наиболее часто используемыми аккумуляторами являются аккумуляторы Li-Po.
Монитор батареи:
Монитор батареи не является предметом первой необходимости. Тем не менее, это очень полезно, так как позволяет узнать, сколько сока у вас осталось.
RC Controller:
Используется пилотом дрона для управления дроном.
Приемник RC:
Принимает входные данные, когда вы или кто-то еще использует контроллер.
Монтажная площадка:
Снижает вибрации и, следовательно, улучшает полет. Это удобно при съемке видео.
Подвес:
Подвес — это система поддержки вашей камеры. Он удерживает вашу камеру под одним и тем же углом, независимо от движения, и уменьшает вибрации. Это важно, если вы хотите превратить свои кадры из любительских в профессиональные.
Камера:
Необходима для записи видео. Лучшие камеры дронов могут снимать в качестве 4K.
USB-ключ/карта Micro SD:
Если вы используете камеру, вам нужно где-то хранить отснятый материал.
Далее! Теперь у вас есть все детали, давайте посмотрим, как собрать собственный дрон.
9 простых шагов: сборка дрона
Шаг 1: Соберите раму.
Если вы делаете раму самостоятельно, вам необходимо ее собрать. В зависимости от того, насколько прочным должен быть ваш дрон, вы можете использовать различные материалы, такие как металл, пластик или дерево.
Ваша рама должна иметь форму буквы X, и каждый пропеллер должен располагаться в каждой точке этой буквы.
Шаг 2: Соберите двигатели и пропеллеры для вашего дрона.
Если вы собираете раму, вам нужно будет сделать отверстия для двигателей и прикрепить их к раме.
Если у вас есть готовая рама, вы можете обнаружить, что она поставляется с креплениями для ваших двигателей.
Шаг 3: Установите электронные регуляторы скорости.
Когда вы прикрепите двигатели, вам нужно будет подключить регуляторы скорости к нижней части рамы дрона.
Шаг 4: Подсоедините разъем аккумулятора к PDB.
Прикрепите PDB к нижней части дрона и подключите разъемы аккумулятора.
Шаг 5: Прикрепите шасси.
На вашем дроне должно быть шасси, чтобы поглощать удары при приземлении на твердую поверхность.
Сделайте посадочный материал из чего-то твердого и гибкого, так как это поможет вам не повредить дрон при его установке.
Шаг 6: Выберите и добавьте свой полетный контроллер.
Установите контроллер полета на свой дрон. Убедитесь, что вы добавили губку или какой-нибудь мягкий материал под контроллер, чтобы уменьшить вибрации.
Тогда ваш дрон должен быть в состоянии оставаться стабильным в воздухе и чувствовать сдвиги и изменения ветра.
Шаг 7: Подключите дрон к GCS и откалибруйте датчики.
Убедитесь, что все работает правильно. Вы можете проверить это, используя GCS и откалибровав различные датчики на вашем дроне.
Шаг 8. Перепроверьте и протестируйте.
Проверьте и перепроверьте, все ли работает и откалибровано. Выберите безопасное место, медленно увеличьте скорость своего дрона и летите на малой высоте в первый раз, когда вы тестируете свой дрон.
Шаг 9: Подготовьтесь к взлету.
Теперь осталось только выяснить, где вам разрешено летать на вашем дроне, и убедиться, что все в порядке, прежде чем отправляться туда и летать на своем новеньком дроне.
Арендуйте или подпишитесь на свой следующий дрон
Теперь вы знаете, как собрать дрон и подготовить его к полету, но если вы только начинаете, как насчет аренды или подписки на ваш следующий дрон?
Вам не нужно беспокоиться о значительных инвестициях и иметь точные технические знания в области пайки и калибровки. Просто рискните и попробуйте дрон.
А если в вашем арсенале снаряжения еще не все, ознакомьтесь с необходимой камерой здесь.
Часто задаваемые вопросы о том, как собрать дрон
Как собрать дрон с нуля?
Чтобы собрать дрон, нужно подобрать нужные детали и соединить их в свой собственный дрон.
Трудно ли построить дронов?
Создание дрона требует некоторых технических знаний.
Дорого ли построить собственный дрон?
Создание дрона требует правильных деталей и может потребовать значительных инвестиций, а также зависит от того, сколько вы хотите и можете сделать сами.
Арендуйте дрон у местных создателей.