Квадрокоптер своими руками


Сделать своими руками квадрокоптер, не так уж и сложно и не сильно затратно. В этой статье мастер-самодельщик покажет нам, как это сделать.
Инструменты и материалы:
-Плата приемника H8 Mini;
-Пульт управления;
-Комплект двигателей с винтами;
-Батарея;
-Фанера;
-Карандаш;
-Линейка;
-Наждачная бумага;
-Лобзик;
-Паяльные принадлежности;
-Клеевой пистолет;
-Скотч;
Шаг первый: рама
На фанере чертит квадрат 6*6 сантиметров. Вписывает в квадрат круг. Прочерчивает дуги крестовины. Выпиливает раму. Шлифует.
Шаг второй: плата и двигатели
Соединяет проводами клеммы двигателей с контактами платы.
Приклеивает плату и двигатели к раме.
Фиксирует двигатели скотчем.
Шаг третий: батарея
Приклеивает и подсоединяет батарею.
Проверяет работу двигателей.


Теперь осталось установить ножки.
Квадрокоптер готов, можно проводить испытания.


Видео с процессом изготовления квадрокоптера.
Источник
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Мастерим квадрокоптер своими руками

Желание подняться в небо, наверное, никогда не покидало человека. В этой инструкции мы сделаем шаг навстречу мечте и сделаем своими руками квадрокоптер.


Смотрим на рисунок и по макету моделируем каркас квадрокоптера. В основе этого устройства будет находиться деревянная рама. Для её изготовления понадобятся деревянные рейки следующих размеров: 60х3х2.4см и 57х3х2.4 см, а также прямоугольная дощечка 15х6х0.2см. Далее используя клей и гвозди делаем «крестовую» конструкцию, которая и послужит каркасом.
Шаг 2. Подготавливаем мотор

На данном этапе самое время установить мотор, пропеллер и устройство по регулировке скоростей (все элементы можно приобрести в Интернете).
Для изготовления квадрокоптера из этой инструкции, использовался двигатель EMAX MT2213 935kv, винты в 24 сантиметров, EMAX 4in1 ESC. Шаг 3. Установка двигателя
Прибегнув к штангенциркулю и карандаша, наносим разметки на основу и просверливаем ее дрелью, затем закрепляем мотор соответствующими винтами.
Шаг 4: Установка регулятора скорости

После этапа с установкой двигателя на нижнюю часть рамы устанавливаем стяжки контроллера скорости и провода, после этого — батарею питания.
Шаг 5: Крепим шасси

Для изготовления шасси можно с трубы диаметром 15 см, обрезать шириной в 2 см. кольца, в количестве 4 шт.и крепим их к каркасу скотчем. Этот шаг предназначен для плавной посадки квадрокоптера на поверхность.
Шаг 6: Монтаж контроллера квадрокоптера
Именно он стабилизирует полет устройства и является главным элементом этого процесса. Лидеры продаж:
• «DJI Naza» — «продвинутый» контроллер, в ценовом сегменте, подороже вышеуказанного, но с набором разных функций.
• «OpenPilot CC3D» — основан на STM32 и MPU6000 и шесть каналов. Также его можно перепрошивать.
• «NAZE32» — замысловатое устройство, с которым работают опытнфые специалисты.
• «KK2.1» – самый популярный в Интернете, оснащен AVR микроконтроллером, имеет жидкокристаллический дисплей.
• «KKMulticontroller» – основан на Atmel AVR, считается немного устаревшей моделью.
Шаг 7: Устанавливаем пульт
Вообщем, модели разнообразные от дорогостоящих — Futaba, Spektrum, до малостоящих — Turnigy и Flysky. Для изготовления этого квадрокоптера понадобится 4-х канальный пульт управления.
Шаг 8: Установка и настройка электронной «начинки»
По приведенной видео инструкции устанавливаем всю имеющуюся электронику.
Шаг 9: Время тестов
До того как запустить квадрокоптер, нужно опробовать первый полет, что и делаем.
Шаг 10 : Запуск
Ко дну каркаса крепим и подключаем батарею и устанавливаем квадрокоптер на открытую ровную поверхность. Отходим подальше и с помощью дистанционного пульта управления запускаем устройство и наслаждаемся полётом.
Вот так с помощью данной инструкции мы сделали квадрокоптер, хотя и не являемся авиаконструкторами! Не останавливайтесь на достигнутом, и удачи во всех начинаниях!
Источник
Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.|
Самодельный квадрокоптер Old Style
Изготовление Old Style квадрокоптера своими руками.
Подробнее
| 2 комментария
| 791 просмотр Теги: самоделка, дрон своими руками |
|
|
|
|
|
Самодельный квадрокоптер из Лего-вертолета
Теги: своими руками, сборка квадрокоптера |
|
|
Собираем самодельный FPV квадрокоптер
Собираем FPV квадрокоптер на базе рамы – Realacc Kylin 210 Подробнее | 0 комментариев | 3563 просмотраТеги: своими руками, сборка квадрокоптера | |
|
Вторая жизнь Tiny Whoop`а
Что можно сделать из старого дрона. Подробнее | 0 комментариев | 2371 просмотрТеги: своими руками, tiny whoop |
|
|
Самодельный квадрокоптер на XS220 и AuroraRC
Собираем и настраиваем квадрокоптер на базе комплекта – AuroraRC C2 Flytower OMVT F4 и раме Realacc XS220. Подробнее | 0 комментариев | 973 просмотра |
|
|
FPV-антенна своими руками
Изготовление FPV-антенн в домашних условиях Подробнее | 1 комментарий | 4451 просмотрТеги: самоделка, антенна, fpv антенна |
|
|
Сборка квадрокоптера на раме Realacc XS220
Собираем набор для сборки гоночного квадрокоптера на раме Realacc XS220. Подробнее | 0 комментариев | 2485 просмотровТеги: сборка квадрокоптера, realacc xs220 |
|
|
|
|
|
Ремонт квадрокоптеров
Как отремонтировать квадрокоптер после падения своими руками. Подробнее | 2 комментария | 8303 просмотраТеги: советы, ремонт квадрокоптера |
|
|
Поплавки для квадрокоптера
Об изготовлении поплавков для радиоуправляемого квадрокоптера. Подробнее | 0 комментариев | 4356 просмотровТеги: вода и квадрокоптер |
|
|
Трикоптер Т конфигурации
Изготовление и полеты на трикоптере из деревянных реек. Подробнее | 0 комментариев | 5981 просмотрТеги: трикоптер |
|
|
Рама квадрокоптера на 3D принтере
Обзор напечатанной рамы Spidex Micro, подборка электроники для этой рамы. Подробнее | 0 комментариев | 4870 просмотров Теги: spidex micro, 3d принтер |
|
|
Все для Drone Racing
Подборка электроники и комплектующих для сборки FPV квадрокоптера 230-250 размера. Подробнее | 6 комментариев | 42342 просмотраТеги: аккумулятор, fpv, drone racing, 250 |
|
|
Spidex Micro — квадрокоптер под 3D принтер
Эти чертежи самодельного квадрокоптера разрабатывались специально под 3D принтер. Подробнее | 0 комментариев | 11236 просмотровТеги: чертежи квадрокоптера, stl файл, spidex micro, 250 размер |
|
|
Квадрокоптер из бумаги
Шуточное, но, тем не менее вполне летающее изготовление квадрокоптера из бумаги. Подробнее | 0 комментариев | 11514 просмотровТеги: самодельный квадрокоптер |
|
|
250 квадрик на 3D принтере
STL файлы для печати квадрокоптера, видеоинструкция по сборке, видео полетов. Подробнее | 2 комментария | 24589 просмотровТеги: чертежи квадрокоптера, stl файл, drone racing, 250 размер |
|
|
Чертежи квадрокоптера с жесткой рамой
Жесткая складная рама с БК подвесом. Подробнее | 1 комментарий | 15805 просмотровТеги: чертежи квадрокоптера, fpv квадрокоптер |
Как сделать квадрокоптер своими руками
Обычно у любого квадролетчика со временем скапливается куча разных старых моторов, электроники и прочего.
Современный квадрокоптер из этих деталей не собрать, но Old Style дрон может получится вполне интересным. Итак, давайте приступим!
Эта сборка самодельного квадрокоптера будет интересна не только тем, у кого завалялись старые детали, но и новичкам, которые могут купить электронику для дрона (список со ссылками смотрите в конце статьи) по весьма низкой цене и сделать летающий дрон своими руками.
Инструменты и материалы:
- Фанера толщиной 7 мм и размером примерно 30 x 22 см;
- Алюминиевая профильная труба 25*25 мм — 1 метр;
- Пропеллеры размером 1045;
- Приемник и контроллер;
- Моторы и ESCs x 4;
- Изолента;
- Полетный контроллер;
- Крепеж;
- Батарея Lipo;
- Зарядное устройство;
- Провода;
- Фиксатор резьбы;
- Паяльные принадлежности;
- Разъемы XT60;
Шаг первый: корпус
Напечатайте шаблон и приклейте его на фанеру. Вырежьте детали и просверлите все отверстия.
Установите аккумулятор на основание и отбалансируйте основание. Очертите аккумулятор. Приклейте планки с трех сторон аккумулятора.
Шаг второй: рама
Разрежьте алюминиевую профильную трубу на две равные части (по 50 см). Вырежьте по середине труб два паза по 2,5 см. Просверлите по центру отверстия. Соберите крестовину и закрепите болтом.
Теперь используйте крепление двигателя, которое поставляется с ними, чтобы разметит крепежные отверстия. Просверлите отверстия. Заусеницы нужно зашлифовать.
Разметьте и просверлите крепежные отверстия для крепления корпуса к раме.
Приклейте к корпусу боковые планки.
Шаг третий: монтаж
Теперь нужно закрепить моторы на раме. На крепежные винты обязательно нужно нанести фиксатор резьбы, в противном случае, винты выкрутятся и моторы улетят.
Подключите ESC к двигателям так, чтобы верхний левый двигатель вращался по часовой стрелке, верхний правый двигатель вращался против часовой стрелки, нижний правый двигатель вращался по часовой стрелке, а нижний левый двигатель вращался против часовой стрелки. Чтобы изменить направление вращения двигателей, поменяйте местами любые два из трех проводов. Заизолируйте соединения.
Протяните провода через рамку и протяните в отверстие, ESC закрепляется внутри трубок рамки.
Соедините все черные (минус) и все красные (плюс) провода вместе. Припаяйте два провода к разъему XT60 (красный и черный). Закрепите приемник к корпусу с помощью двустороннего скотча.
Протяните провода от контроллера и приемника через отверстия в крышке отсека, затем прикрутите крышку. Прикрутите контроллер к крышке. Подсоедините провода к плате управления полетом.
Шаг четвертый: настройка
Подключите батарею и контроллер должен загрузиться. На дисплее должно появиться сообщение об ошибке. Проигнорируйте его и нажмите кнопку меню.
Прокрутите вниз и нажмите «сброс настроек». Затем должно появиться меню для выбора желаемой рамы дронов. Прокрутите вниз, пока не дойдете до режима Quadcopter- X и нажмите «принять». Нажмите назад и выберите «калибровка AUX». Поместите дрон на ровную поверхность и нажмите «калибровать». Когда это будет сделано, прокрутите вверх до настроек режима и измените автоматический уровень с «AUX» на «Always».
Отключите аккумулятор, включите контроллер, а затем снова подключите аккумулятор. Контроллер полета должен включиться и показывать SAFE. Переместить left в левый угол, и дисплей должен измениться с SAFE на ARMED,
Шаг пятый: пропеллеры
Закрепите винты на валы двигателя.
Все готово. И напоследок несколько советов от мастера.
По началу квадрокоптер может показаться сложным в управлении. Лучший способ начать полет — это подняться примерно на 1 метр над землей и полетать назад и вперед, влево и вправо, а затем начать полет квадрокоптера по кругу. Квадрокоптер не любит «рыскающий» полет, поэтому учитесь плавно управлять.
Начиная летать, держите заднюю часть дрона лицом к себе, чтобы вы всегда знали.
Винты из углеродного волокна прочнее пластиковых и не так ломаются.
Удачных полетов!
Подборка электроники для самодельного квадрокоптера:
4PCS XXD A2212 1000KV
Купить: BangGood, AliExpress 4X XXD HW30A 30A
Купить: BangGood, AliExpress Gemfan 1045 Carbon Nylon
Купить: BangGood, AliExpress Gemfan 9047 Carbon Nylon
Купить: BangGood, AliExpress Gemfan 1045 Carbon Nylon
Купить: BangGood, AliExpress Betaflight / Openpilot CC3D
Купить: BangGood, AliExpress KK2.1.5 LCD Flight Control
Купить: BangGood, AliExpress ZOP Power 11.1V 2200MAH
Купить: BangGood, AliExpress XF Power 11.1V 2200mAh
Купить: BangGood, AliExpress XF POWER 11.1V 2200mAh
Купить: BangGood, AliExpress FlySky FS-i6 2.4G 6CH
Купить: BangGood, AliExpress IMaxRC IMax B3 Pro
Купить: BangGood, AliExpress New B3 20W Balance
Купить: BangGood, AliExpress ;
Похожие статьи:
Видеоподборки про RC моделизм → Самодельный FPV шлем. FPV на экране смартфона.
Видеоподборки про RC моделизм → Аппаратура радиоуправления своими руками / Проэкт RC Аппаратура
Квадрокоптер своими руками → FPV-антенна своими руками
Видеоподборки про RC моделизм → Аппаратура радиоуправления из джойстика Defender cobra m5
Видеоподборки про RC моделизм → Дистанционный выключатель RC switch для моделей своими руками
Видеоподборки про RC моделизм → Как сделать мини Racer Quadcopter
Постройка самодельного складного коптера
 Доброго времени суток уважаемые Муськовчане. Я недавно на Муське и это мой первый обзор здесь. Речь сегодня пойдет о постройке самодельного складного квадрокоптера для съемок. Итак кому интересно вэлком.
Доброго времени суток уважаемые Муськовчане. Я недавно на Муське и это мой первый обзор здесь. Речь сегодня пойдет о постройке самодельного складного квадрокоптера для съемок. Итак кому интересно вэлком. Сначала немного предыстории. Rc тематикой болен около 3х лет, и за это время собрал несколько самосборных коптеров. И вот захотелось сделать компактный дрон, что бы и в рюкзак помещался и в сумку мотоцикла, словом что бы можно было взять с собой куда угодно… ну почти, и обязательно самодельный.
Если вы решили всерьез заняться RC тематикой, то, скажем так, моделей у вас будет много разных, но вот три вещи, покупаются всерьез и надолго.
1. Зарядка для акумуляторов. Здесь я пожадничал, и купил неоригинал Imax B6 AC.
 . Хоть и неоригинал, но работает исправно уже четвертый год.
. Хоть и неоригинал, но работает исправно уже четвертый год. 2. Аппаратура радиоуправления. Я свою брал три года назад, на тот момент лучшую из бюджетных Radiolink AT9.
 . Сейчас она уже не выпускается, поэтому ссылку даю на более новую AT9S aliexpress.com/item/AT9S-2-4-9CH-R9DS-AT9/32841954226.html. С тех пор вышел нынешний бестселлер Taranis Qx7, но менять Radiolink на нее, для себя я не вижу смысла, а если приобретать с нуля первую аппаратуру, лучше взять Таранис.
. Сейчас она уже не выпускается, поэтому ссылку даю на более новую AT9S aliexpress.com/item/AT9S-2-4-9CH-R9DS-AT9/32841954226.html. С тех пор вышел нынешний бестселлер Taranis Qx7, но менять Radiolink на нее, для себя я не вижу смысла, а если приобретать с нуля первую аппаратуру, лучше взять Таранис. 3. FPV очки или шлем. Тут вопрос довольно индивидуальный, нужно мерить конкретный образец именно на Ваше лицо. Многим не подходит фокусное расстояние некоторых шлемов, многих не устраивает форма маски некоторых очков, а может и не подойти межзрачковое расстояние. Что до меня, я начинал летать в старых очках Fatshark, о них даже говорить не буду, ибо настолько убогие, что просто нет слов. Затем использовал шлем Eachine EV800.
 aliexpress.com/item/New-Arrival-Eachine-EV800-5-Inches-800×480-FPV-Video-Goggles-5-8G-40CH-Raceband-Auto-Searching/32666906411.html. Вот в нем уже очень неплохое изображение и широкий диапазон каналов приемника. Сейчас летаю в купленых на барахолке, очках Aomway Commander V1
aliexpress.com/item/New-Arrival-Eachine-EV800-5-Inches-800×480-FPV-Video-Goggles-5-8G-40CH-Raceband-Auto-Searching/32666906411.html. Вот в нем уже очень неплохое изображение и широкий диапазон каналов приемника. Сейчас летаю в купленых на барахолке, очках Aomway Commander V1  . Очки хороши, даже очень, но приобретать их за полную стоимость меня жаба душила, так что искал б.у.
. Очки хороши, даже очень, но приобретать их за полную стоимость меня жаба душила, так что искал б.у. А сейчас давайте перейдем непосредственно к самому коптеру, начнем пожалуй с рамы. Рама это одна из немногих вещей, купленых не в Китае, так что особо останавливаться на ней не буду. Скажу только, что рама конструкции Андрея Грушина. С учетом использования современных комплектующих, укоротил ее на 75мм. forum.rcdesign.ru/blogs/121800/blog20789.html Она сделана из текстолита и алюминиевого профиля 10мм.
 Акумулятор я использовал Onbo 4S 4200 mAh 35c.
Акумулятор я использовал Onbo 4S 4200 mAh 35c.  Идем дальше, мозгом нашего коптера будет контролер Matek F405CTR
Идем дальше, мозгом нашего коптера будет контролер Matek F405CTR  aliexpress.com/item/matek-BetaFlight-F405-CTR-F405-CTR-PDB/32856776468.html»>, не самый удачный контролер для большой рамы из-за того, что сравнительно большие пропеллеры вызывают больше низкочастотных вибраций, чем пропеллеры гоночных коптеров(для коих он и предназначен), а хорошо организовать виброразвязку этого контролера трудно потому что он совмещен с платой разводки питания, а к ней тянутся достаточно толстые силовые провода. Далее, выбираем моторы. Двигатели серии 2216 отмел, как довольно тяжелые, в то же время, требовалась достаточная мощность, что бы таскать камеру с подвесом. Выбрал моторы Gartt 2312.
aliexpress.com/item/matek-BetaFlight-F405-CTR-F405-CTR-PDB/32856776468.html»>, не самый удачный контролер для большой рамы из-за того, что сравнительно большие пропеллеры вызывают больше низкочастотных вибраций, чем пропеллеры гоночных коптеров(для коих он и предназначен), а хорошо организовать виброразвязку этого контролера трудно потому что он совмещен с платой разводки питания, а к ней тянутся достаточно толстые силовые провода. Далее, выбираем моторы. Двигатели серии 2216 отмел, как довольно тяжелые, в то же время, требовалась достаточная мощность, что бы таскать камеру с подвесом. Выбрал моторы Gartt 2312.  Почему то найти на Алиэкспрессе я их сейчас не смог (а я только там и закупаюсь), так что ссыль дать не могу. Идем дальше, регулятор я использовал Racerstar 4 в 1 на 30а
Почему то найти на Алиэкспрессе я их сейчас не смог (а я только там и закупаюсь), так что ссыль дать не могу. Идем дальше, регулятор я использовал Racerstar 4 в 1 на 30а 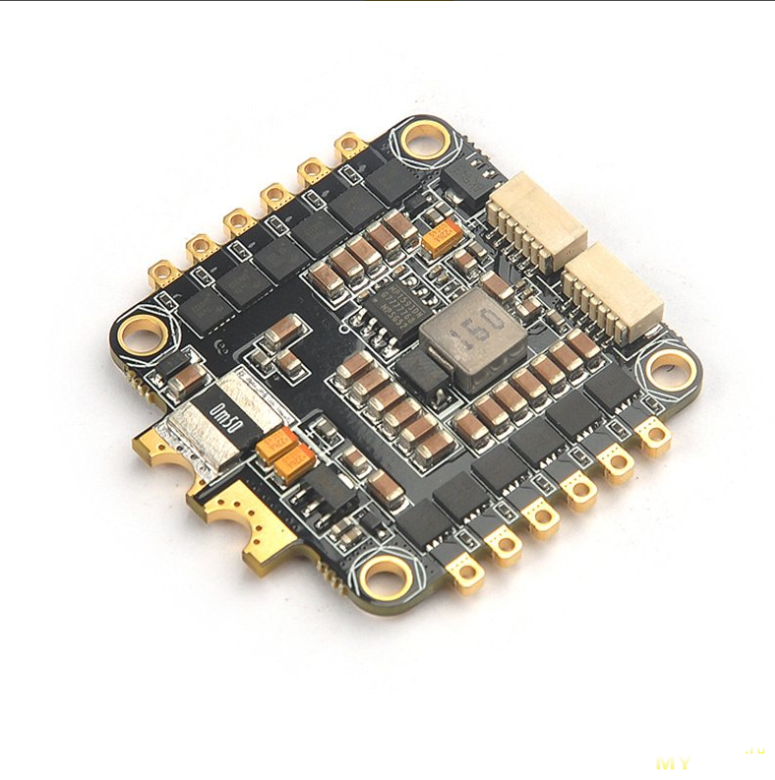 aliexpress.com/item/2017-New-Arrival-Racerstar-Shot30A-ESC-30A-30amp-3-6S-4-in-1-BLHeli-S-BB2/32806268101.html. Подвес сначала хотел использовать пластиковую, немного тюнингованную, Walkera G-2D
aliexpress.com/item/2017-New-Arrival-Racerstar-Shot30A-ESC-30A-30amp-3-6S-4-in-1-BLHeli-S-BB2/32806268101.html. Подвес сначала хотел использовать пластиковую, немного тюнингованную, Walkera G-2D  , но впоследствии от нее пришлось отказаться, (как и от регулятора 4 в 1). Почему, об этом чуть позже. Сейчас на коптер установлен подвес Tarot t-3D
, но впоследствии от нее пришлось отказаться, (как и от регулятора 4 в 1). Почему, об этом чуть позже. Сейчас на коптер установлен подвес Tarot t-3D  Брал тут, только он сильно подорожал aliexpress.com/item/Tarot-TL3T01-3Aixs-Brushless-Gimbal-for-DIY-RC-Drone-with-camera-Gopro-HERO3-HERO4-Sport-Camera/32642968051.html. Подвес по всем критериям очень средненький, но довольно легкий и компактный. Камера из разряда «дешево и сердито», народная Xiaomi Yi
Брал тут, только он сильно подорожал aliexpress.com/item/Tarot-TL3T01-3Aixs-Brushless-Gimbal-for-DIY-RC-Drone-with-camera-Gopro-HERO3-HERO4-Sport-Camera/32642968051.html. Подвес по всем критериям очень средненький, но довольно легкий и компактный. Камера из разряда «дешево и сердито», народная Xiaomi Yi  Брал тут aliexpress.com/item/YI-1080P-Action-Camera-Lime-Green-High-definition-16-0MP-155-Degree-Angle-3D-Noise-Reduction/32826768360.html. Для своей цены она снимает просто великолепно, а есть еще возможность использовать скрипты для улучшения качества видео, но в планах перейти конечно на Xiaomi Yi 4k. Для передачи видеосигнала с камеры в полетный контролер (там ведь встроенное ОСД (Осд, это микросхема, которая накладывает различные параметры полета (высота, скорость и.т.д.) прямо на изображение)), взял вот такой шнурок
Брал тут aliexpress.com/item/YI-1080P-Action-Camera-Lime-Green-High-definition-16-0MP-155-Degree-Angle-3D-Noise-Reduction/32826768360.html. Для своей цены она снимает просто великолепно, а есть еще возможность использовать скрипты для улучшения качества видео, но в планах перейти конечно на Xiaomi Yi 4k. Для передачи видеосигнала с камеры в полетный контролер (там ведь встроенное ОСД (Осд, это микросхема, которая накладывает различные параметры полета (высота, скорость и.т.д.) прямо на изображение)), взял вот такой шнурок  Вот ссылка… aliexpress.com/item/FPV-AV-Video-Output-Transmission-Cable-Line-Image-Data-Rechargeable-Cable-For-XiaoMi-Yi-Sport-Action/32789312005.html.
Вот ссылка… aliexpress.com/item/FPV-AV-Video-Output-Transmission-Cable-Line-Image-Data-Rechargeable-Cable-For-XiaoMi-Yi-Sport-Action/32789312005.html.Продолжаем. Видеопередатчик, для онлайн передачи видеосигнала на землю, временно поставил самый дешевый Boscam Ts5828 мощностью 600 мВт.
 Брал тут aliexpress.com/item/2015-New-FPV-5-8GHz-600mW-32-Channels-Mini-Wireless-A-V-Transmitting-TX-Module-TS5828/32299796347.html. Не знаю, честные там милливаты или нет, но показал он себя довольно не плохо, на 3 км связь прекрасная. Дальше пока не летал. Антенку к нему я взял фирмы Aomway, вот такую
Брал тут aliexpress.com/item/2015-New-FPV-5-8GHz-600mW-32-Channels-Mini-Wireless-A-V-Transmitting-TX-Module-TS5828/32299796347.html. Не знаю, честные там милливаты или нет, но показал он себя довольно не плохо, на 3 км связь прекрасная. Дальше пока не летал. Антенку к нему я взял фирмы Aomway, вот такую  Брал их тоже на Али aliexpress.com/item/1pcs-5-8G-3dBi-4-Leaf-Clover-AV-Transmission-RHCP-TX-RX-Set-SMA-RP-SMA/32650636196.html Приемник для этого коптера я выбрал R12dsm
Брал их тоже на Али aliexpress.com/item/1pcs-5-8G-3dBi-4-Leaf-Clover-AV-Transmission-RHCP-TX-RX-Set-SMA-RP-SMA/32650636196.html Приемник для этого коптера я выбрал R12dsm  , предварительно заменив на нем антены, на более качественные. Приемник GPS у меня Radiolink Ts100
, предварительно заменив на нем антены, на более качественные. Приемник GPS у меня Radiolink Ts100  Брал тут aliexpress.com/item/TS100-M8N-gps-UBX-M8030/32845080601.html. Этот модуль очень маленький, легкий, имеет на плате компас. Ловит как GPS, так и ГлоНасс. В хорошую погоду ловит до 23 спутника, и делает это очень быстро. К нему нам понадобится стойка крепления. Нужна она для того, что бы максимально отдалить компас от наводок, вызванных большими токами в силовых цепях дрона. Я взял самую простую
Брал тут aliexpress.com/item/TS100-M8N-gps-UBX-M8030/32845080601.html. Этот модуль очень маленький, легкий, имеет на плате компас. Ловит как GPS, так и ГлоНасс. В хорошую погоду ловит до 23 спутника, и делает это очень быстро. К нему нам понадобится стойка крепления. Нужна она для того, что бы максимально отдалить компас от наводок, вызванных большими токами в силовых цепях дрона. Я взял самую простую  вот ссылочка на нее… aliexpress.com/item/7/32853297266.html. Ну и в заключении, пропеллеры. Я перепробовал достаточное количество размеров и материалов пропеллеров и конкретно на этом коптере лучше всех себя показали карбоновые пропеллеры размера 9047. Диаметр у них 9 дюймов при шаге 47.
вот ссылочка на нее… aliexpress.com/item/7/32853297266.html. Ну и в заключении, пропеллеры. Я перепробовал достаточное количество размеров и материалов пропеллеров и конкретно на этом коптере лучше всех себя показали карбоновые пропеллеры размера 9047. Диаметр у них 9 дюймов при шаге 47.  . Вот тут брал… aliexpress.com/item/F05309-9×4-7-3K-Carbon-Fiber-Propeller-CW-CCW-9047-CF-Props-Blade-For-RC-Quadcopter/964675104.html
. Вот тут брал… aliexpress.com/item/F05309-9×4-7-3K-Carbon-Fiber-Propeller-CW-CCW-9047-CF-Props-Blade-For-RC-Quadcopter/964675104.htmlНу что, с комплектацией вроде все, если что забыл, ткните носом. Приступаем к сборке. Заранее приношу извинения за качество фото и их малое количество. Слишком был увлечен процессом. Итак поехали!
Первым делом отрезаем кусочки 10мм профиля на нужную длину (какие хотим в итоги лучи) и сверлим отверстия для крепления моторов, прокладки проводов и антен приемника радиоуправления. Получается как то так…. , крепим моторы к внутренней стороне профиля. Штатные винты придется немного укоротить, профиль намного тоньше, чем лучи любой готовой рамы, на которые расчитаны эти винты. Если этого не сделать, винт упрется в обмотку двигателя и скорее всего он преждевременно скончается. В конечном итоге получается как то так…
, крепим моторы к внутренней стороне профиля. Штатные винты придется немного укоротить, профиль намного тоньше, чем лучи любой готовой рамы, на которые расчитаны эти винты. Если этого не сделать, винт упрется в обмотку двигателя и скорее всего он преждевременно скончается. В конечном итоге получается как то так… . На этом фото видны и антены радиоуправления. Провода от моторов протягиваем через проделанные отверстия внутрь луча. Я еще дополнительно их защитил оплеткой «змеиная кожа». Вот как то так….
. На этом фото видны и антены радиоуправления. Провода от моторов протягиваем через проделанные отверстия внутрь луча. Я еще дополнительно их защитил оплеткой «змеиная кожа». Вот как то так…. . Далее, красим детали рамы в понравившийся цвет, крепим готовые лучи, регулятор оборотов и припаиваем моторы к его выводам ….
. Далее, красим детали рамы в понравившийся цвет, крепим готовые лучи, регулятор оборотов и припаиваем моторы к его выводам ….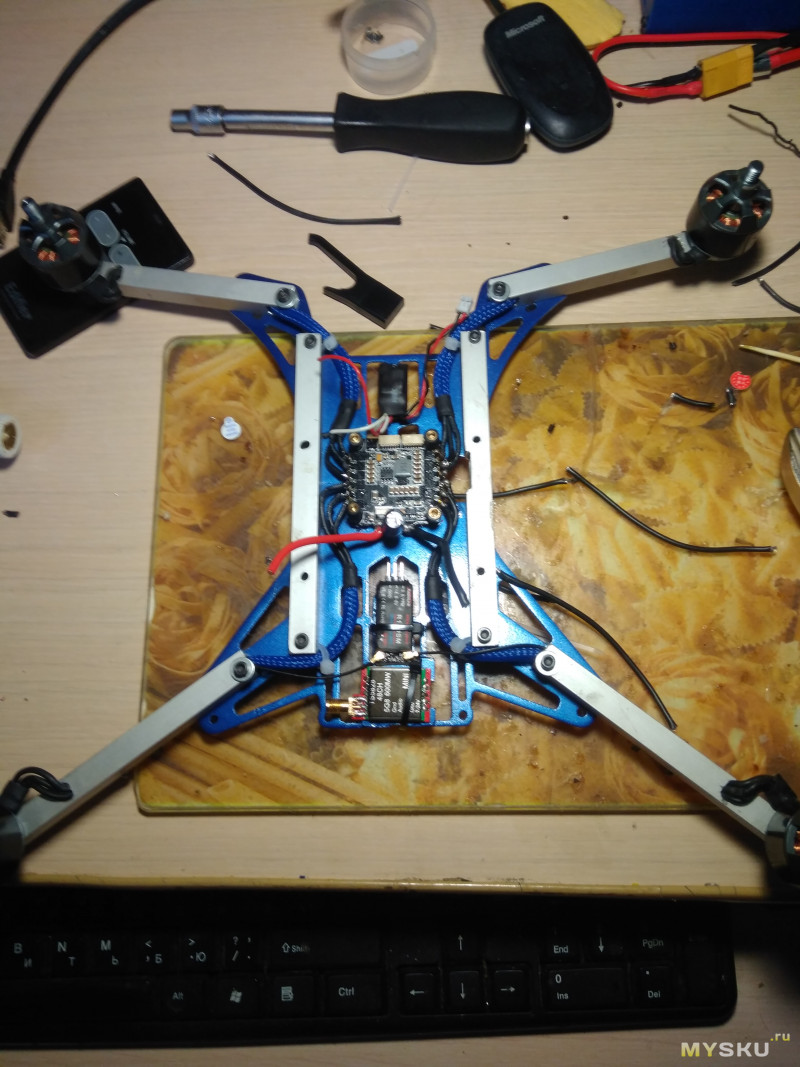 Тут же на фото видно установку приемника радиоуправления, видеопередатчика и понижающего стабилизатора для питания подвеса. Стабилизатор нужен для того что бы вне зависимости от напряжения силового акумулятора (14.0-16.8в), подвес питался всегда от 12в. Далее устанавливаем полетный контролер, желательно на демпферы. Я взял вот такие (за что и поплатился)
Тут же на фото видно установку приемника радиоуправления, видеопередатчика и понижающего стабилизатора для питания подвеса. Стабилизатор нужен для того что бы вне зависимости от напряжения силового акумулятора (14.0-16.8в), подвес питался всегда от 12в. Далее устанавливаем полетный контролер, желательно на демпферы. Я взял вот такие (за что и поплатился)  , но об этом чуть позже… К полетному контролеру припаиваю приемник радиоуправления, FPV кабель от камеры и кабель к видеопередатчика, а так же силовой разъем от акумулятора (его я решил вывести на проводах подальше от ПК) …
, но об этом чуть позже… К полетному контролеру припаиваю приемник радиоуправления, FPV кабель от камеры и кабель к видеопередатчика, а так же силовой разъем от акумулятора (его я решил вывести на проводах подальше от ПК) …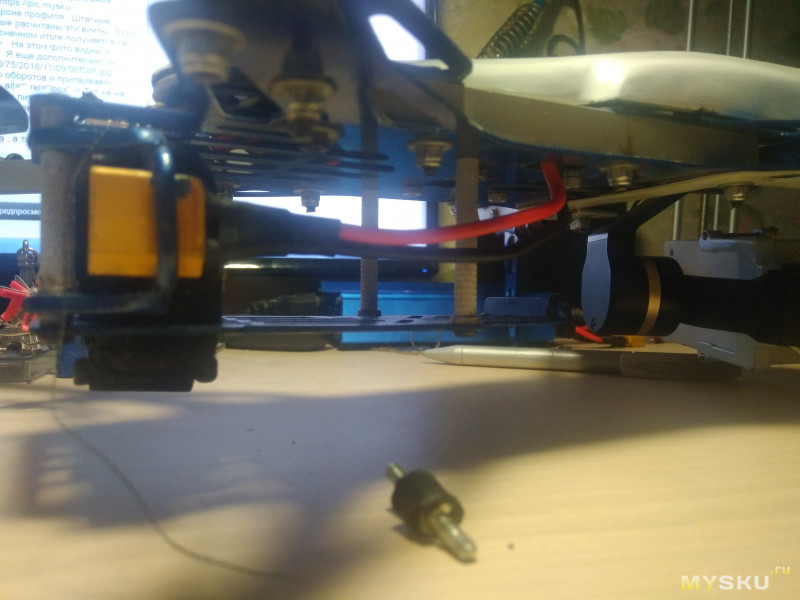
 … как то так. Припаиваем также разъем для подключения GPS приемника и компаса. Также нужно припаять два силовых провода для питания регулятора оборотов и шлейф управления регулятором. Все припаяно по схеме, взятой с официального сайта производителя ПК. Вот она….
… как то так. Припаиваем также разъем для подключения GPS приемника и компаса. Также нужно припаять два силовых провода для питания регулятора оборотов и шлейф управления регулятором. Все припаяно по схеме, взятой с официального сайта производителя ПК. Вот она…. по этой схеме подключается регулятор, а вот по этой все остальное….
по этой схеме подключается регулятор, а вот по этой все остальное….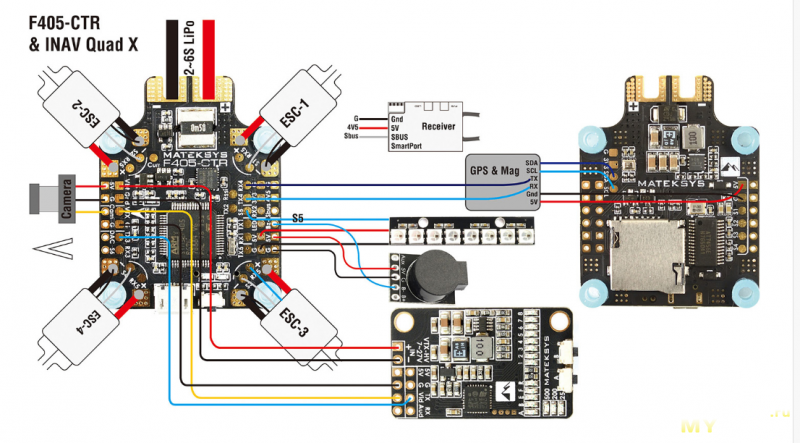 . Здесь не обращаем внимание на раздельные регуляторы. Получается примерно вот так….
. Здесь не обращаем внимание на раздельные регуляторы. Получается примерно вот так….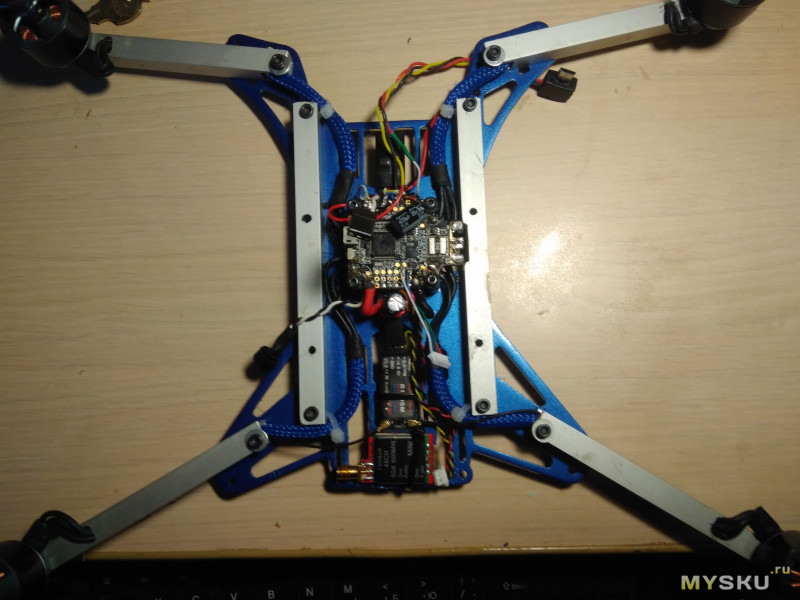 . На фото так же виден конденсатор, который припаивается параллельно силовому разъему и призван сглаживать скачки напряжения в силовой цепи. Конденсатор идет в комплекте с ПК. Так же виден конектор для управления наклоном камеры, он припаивается к выводу S6 полетного контролера и к земле. Собственно можно собирать раму до конца, ставить массогабаритный макет камеры с подвесом ( что бы не убить нежную технику в случае незапланированного краша ), сделать начальные настройки и идти в поле настраивать более точно. На квадрике установлена прошивка Inav 1.9.1. Как прошивать полетный контролер и настраивать Inav я здесь не буду описывать. Это довольно обширная тема, во первых, требующая отдельного обзора, во вторых уже полно видео и рекомендации от более опытных людей с более понятным объяснением. Но если кому нужно, могу объяснить на пальцах. А мы продолжаем… На этом фото первый полет и зависание в точке. Видео висения и пример съемки коптера будет в конце обзора…
. На фото так же виден конденсатор, который припаивается параллельно силовому разъему и призван сглаживать скачки напряжения в силовой цепи. Конденсатор идет в комплекте с ПК. Так же виден конектор для управления наклоном камеры, он припаивается к выводу S6 полетного контролера и к земле. Собственно можно собирать раму до конца, ставить массогабаритный макет камеры с подвесом ( что бы не убить нежную технику в случае незапланированного краша ), сделать начальные настройки и идти в поле настраивать более точно. На квадрике установлена прошивка Inav 1.9.1. Как прошивать полетный контролер и настраивать Inav я здесь не буду описывать. Это довольно обширная тема, во первых, требующая отдельного обзора, во вторых уже полно видео и рекомендации от более опытных людей с более понятным объяснением. Но если кому нужно, могу объяснить на пальцах. А мы продолжаем… На этом фото первый полет и зависание в точке. Видео висения и пример съемки коптера будет в конце обзора… . Теперь пришло время остановиться подробнее на демпферах, которые я использовал для полетного контролера. Дело в том, что они немного широки и не встают нормально на регулятор. Я немного их сточил с одной стороны (на фото видно, если присмотреться ), при этом оголилась внутренняя металлическая часть. Она то и замкнула один из выводов регулятора. Пришлось его заменить раздельными Racerstar Lite 30a
. Теперь пришло время остановиться подробнее на демпферах, которые я использовал для полетного контролера. Дело в том, что они немного широки и не встают нормально на регулятор. Я немного их сточил с одной стороны (на фото видно, если присмотреться ), при этом оголилась внутренняя металлическая часть. Она то и замкнула один из выводов регулятора. Пришлось его заменить раздельными Racerstar Lite 30a  По традиции ссылка вот
По традиции ссылка вот
aliexpress.com/item/Best-Deal-4PCS-Racerstar-RS30A-Lite-30A-Blheli-S-BB1-2-4S-Brushless-ESC-For-FPV/32761032518.html… и платой распределения питания от Матек 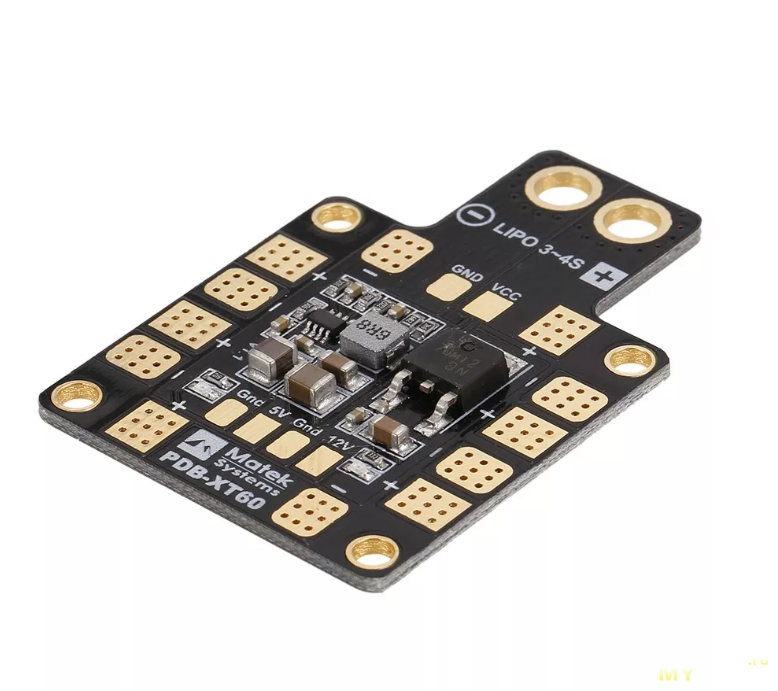 На ней уже есть выход питания на 12в, так что стабилизатор для питания подвеса теперь не нужен. Ну вот теперь с самим дроном действительно все. Налетал в таком виде около 10 акумуляторов, претензий нет. Пора устанавливать подвес и камеру. Поначалу хотел сделать подвес консольного типа (это когда демпферная площадка находится не сверху, а позади камеры ) как на TBS Discovery. Для этого разбираем подвес и делаем для него несколько новых деталей …
На ней уже есть выход питания на 12в, так что стабилизатор для питания подвеса теперь не нужен. Ну вот теперь с самим дроном действительно все. Налетал в таком виде около 10 акумуляторов, претензий нет. Пора устанавливать подвес и камеру. Поначалу хотел сделать подвес консольного типа (это когда демпферная площадка находится не сверху, а позади камеры ) как на TBS Discovery. Для этого разбираем подвес и делаем для него несколько новых деталей … У меня нет ни 3D принтера, ни ЧПУ станка, по этому все делал болгаркой и напильником. Собрал подвес в черновую, получилось вот так….
У меня нет ни 3D принтера, ни ЧПУ станка, по этому все делал болгаркой и напильником. Собрал подвес в черновую, получилось вот так…. Размеры и внешний вид меня полностью устроили и я приступил к покраске и окончательной сборке подвеса. В итоге вот что получилось
Размеры и внешний вид меня полностью устроили и я приступил к покраске и окончательной сборке подвеса. В итоге вот что получилось 
 Подвес подключается к выводам 12В на плате распределения питания и выходу S6 полетного контролера для управления камерой.
Подвес подключается к выводам 12В на плате распределения питания и выходу S6 полетного контролера для управления камерой.
Ну вот вроде бы все, пробуем взлететь и… К сожалению выяснилась одна неприятная особенность. Поток воздуха от передних винтов срывал камеру с места и подвес был не в силах ее стабилизировать. Я пробовал менять настройки, закрывать камеру сверху козырьком (колхоз, но все таки), ничего не помогало. Пришлось продать подвес Валкера и искать другой. Взял Tarot t-3d. Дело в том, что у данного подвеса есть один косяк (кроме фирменного завала горизонта конечно), расстояние между демпферами по длине еще нормальное, но вот по ширине они расположены очень близко друг к другу. Из-за это при ветре может наблюдаться раскачка подвеса и желе. Пришлось немного переделать его нижнюю пластину и расположить демпферы под углом. Такая конструкция зарекомендовала себя очень хорошо на прошлых вариантах подвесов. Далее все просто, креплю подвес на переходную пластину. Ее я сделал из текстолита и получилась она довольно веселой…. . И собственно устанавливаю готовый подвес на нее .
. И собственно устанавливаю готовый подвес на нее . . Подвес также подключил к выводам 12в с платы разводки питания, и к выводу S6 полетного контролера для управления наклоном. Сверху накрыл самодельной крышкой из стеклоткани и эпоксидки, что бы провода и платы не мозолили глаза. Собственно со сборкой наверное все, теперь немного о характеристиках. Расстояние по диагонали между осями моторов 380мм, взлетный вес 1.4кг. Дальность полета до конца не замерил, улетал на 3км и вернулся обратно, хотя управление и видео были без глюков, да и запас по батарее оставался. Думаю 3.5-3.7км вполне по силам пролететь. Высота полета неограничена, но я поднимался максимум на 250м. Время полета от батареи 4S 4200мАч 17-19мин. В сложенном состоянии лишь чуть больше аппаратуры радиоуправления ….
. Подвес также подключил к выводам 12в с платы разводки питания, и к выводу S6 полетного контролера для управления наклоном. Сверху накрыл самодельной крышкой из стеклоткани и эпоксидки, что бы провода и платы не мозолили глаза. Собственно со сборкой наверное все, теперь немного о характеристиках. Расстояние по диагонали между осями моторов 380мм, взлетный вес 1.4кг. Дальность полета до конца не замерил, улетал на 3км и вернулся обратно, хотя управление и видео были без глюков, да и запас по батарее оставался. Думаю 3.5-3.7км вполне по силам пролететь. Высота полета неограничена, но я поднимался максимум на 250м. Время полета от батареи 4S 4200мАч 17-19мин. В сложенном состоянии лишь чуть больше аппаратуры радиоуправления …. И вот такой размер в разложеном состоянии….
И вот такой размер в разложеном состоянии…. .
.
Ну и напоследок немного своих мыслей. Если вам нужен компактный коптер для съемки, то повторять этот проект не очень советую, если только вы не любите собирать, паять и настраивать больше, чем летать. Во первых, он выйдет не дешевле готовых коптеров, во вторых он потребует огромного количества терпения, внимания и усидчивости при настройке, к чему далеко не каждый готов. Что касается меня, то у меня вся периферия (видео очки, аппаратура радиоуправления, акумуляторы, зарядка и камера ) уже была и используется и на других моделях, по этому этот коптер не сильно ударил по карману. Ну и готовые коптеры мне в принципе не интересны, и летать смотря в телефон я вообще не могу. А вот и пример видео съемки с этого квадрика www.youtube.com/watch?v=5io3sqrCsDk&t=0s&list=PL9-3NMPHry-hSREdbJd5T7dOUbJO-mYBM&index=12
Вот такой вот получился рассказ. В чем ошибся, или накосячил, пишите в комментариях, обоснованную критику всегда поддерживаю. Всем пока