самодельная схема устройства для левитации в магнитном поле. Перемещая датчик Холла добиваемся стабильного зависания на максимальном расстоянии от катушки. Закрепляем его
Принцип работы: В данной схеме сила притяжения генерируется между электромагнитом и постоянным магнитом. Равновесное положение нестабильно, и поэтому используется система автоматического контроля и управления. Датчиком контроля служит магнитоуправляемый датчик положения на основе эффекта Холла MD1. Он расположен в центре торца катушки и закреплен. Катушка намотана лакированной проволокой 0,35-04 мм, и имеет около 550 витков. Светодиод НL1 показывает своим свечением, что схема работает. Диод D1 обеспечивает быстродействие работы катушки.
Схема работает следующим образом. При включении ток идет через катушку, которая создает магнитное поле и притягивает магнит. Для того чтобы магнит не перевернулся, его стабилизируют, прикрепив к нему что нибудь снизу. Магнит взлетает и притягивается к электромагниту, но когда магнит попадает в зону действия датчика положения (МD1) он своим магнитным полем отключает его. Датчик в свою очередь подает сигнал на транзистор, который отключает электромагнит. Магнит падает. Выйдя из зоны чувствительности датчика, электромагнит снова включается и магнит опять притягивается к электромагниту. Таким образом, система непрерывно колеблется около некоторой точки.
Схема:
Для сборки нам понадобится:
1) резисторы 270Ом и 1кОм (0.125Вт)
2) транзистор IRF 740
3) светодиод
4) диод 1N4007
5) датчик Холла Ah543
6) макетная плата
7) лакированная проволока 0.35-0.4мм
+ корпус, паяльник и т.п.
Схема:
Собираем катушку. Каркас можно сделать используя тонкий лист стеклотекстолита и старый фломастер.
Вырезаем: (примерный размер катушки: высота — 22мм, диаметр — 27мм)
Склеиваем вместе:
Наматываем примерно 550витков: (лакированная проволока 0.35-0.4мм, в навал, но более-менее стараемся мотать равномерно)
Паяем плату управления: (в качестве разъема питания я использовал обычный 3.5 mm miniJack)
Цоколевка:
Для удобства сборки можно использовать штырьковые разъемы:
В корпусе вырезаем все необходимые отверстия:
Устанавливаем все на свое место:
Теперь необходимо сделать крепление для катушки:
Прикручиваем к корпусу и крепим катушку:
Именно так нужно выгнуть датчик Холла, припаиваем к нему провода:
Подключаем всё до кучи:
После того, как достанем магнит, нужно определить какой стороной его ориентировать к электромагниту. Для этого помещаем и временно закрепляем датчик Холла в самом низу катушки. Включаем левитрон (должен загореться светодиод) и подносим магнит. Если он притягивается к катушке — то магнит ориентирован правильно, но если же магнитное поле катушки выталкивает его, то магнит необходимо перевернуть. Снизу магнита необходимо прикрепить что-то легкое. В моем случае это светодиод.
Перемещая датчик Холла добиваемся стабильного зависания на максимальном расстоянии от катушки. Закрепляем его:
В некоторых продвинутых магазинах можно увидеть стенды с рекламой, на которых показываются интереснейшие эффекты, когда какая-то вещь с витрины или предмет с изображением бренда левитирует. Иногда добавляется вращение. Но такую установку вполне по силам сделать даже человеку без особого опыта в самоделках. Для этого нужен неодимовый магнит, который можно найти в запчастях от компьютерной техники.
Свойства магнита удивительны. Одно из таких свойств отталкиваться одинаковыми полюсами используется в предметах, которые используются как поезда на магнитной подушке, забавные игрушки или основа для эффектных дизайн-объектов и др. Как сделать левитирующий объект на основе магнитов?
Магнитная левитация на видео
Левитация волчка над пятью точечными неодимовыми магнитами. Magnetic Levitation, magnétismo, magnetic experiment, truco magnética, moto perpetuo, amazing game. Занимательная физика.
Обсуждение
hawk
При вращении магнита присутствует левитация а если обороты магнита уменьшаются падает с орбиты… обоснуй этот эффект. Взаимодействие магнитных полей между магнитами это ясно но какая роль вращения. Можно переменным магнитным полем от катушек удерживать магнит в воздухе также.
pukla777
Просьба проработать тему – маховик генератор. Думаю она будет иметь полезное практичное применение. К тому же, оно у вас было очень давно снято в ролике, но очень мало и без информации.
RussiaPrezident
А что если:
Запустить этот волчок и каком нибудь кубе и создать там Вакуум, по идеи не будет сопротивления воздуха и он будет крутиться практически бесконечно! А если не него ещё и медь правильно накрутить и снимать энергию?
Евгений Петров
Читаю комментарии, удивлен, какая нитка!? Там все как есть магнитный волчок, ему задали мех. энергию и есть постоянное магнитное поле волчка при вращении которого вращается и магнитное поле, но главное как! В магнитах домены упакованы не равно распределено это технически не возможно поэтому сам магнит пассивный не может удержаться на магнитной подушке он уйдет на более сильную с
Левитрон — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 27 марта 2016; проверки требуют 9 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 27 марта 2016; проверки требуют 9 правок. Демонстрация работы левитрона.Левитрон — волчок, который, вращаясь, способен «зависать» в воздухе над специальной коробкой, образующей магнитную подушку.
Будучи в раскрученном состоянии, магнитный волчок массой ~20 граммов способен зависнуть над специально расположенной системой постоянных магнитов в коробке (так как магниты постоянные, левитрон не требует источника электрического тока). Волчок представляет из себя кольцевой постоянный магнит с осью вращения, совпадающей с осью симметрии этого магнита. Магнит в коробке обычно тоже кольцо, но большего диаметра. Форма магнитного поля обусловлена сочетанием этих двух размеров. Над центром большого магнита на определённом расстоянии образуется потенциальная яма, то есть небольшая зона, магнитное поле в центре которой несколько слабее, чем у краёв. Это не дает волчку отклониться от центра коробки. Размер этой зоны определяет вес, магнитное поле волчка, и место, где явление возможно. Вращение необходимо для того, чтобы волчок не перевернулся. Момент инерции вращающегося тела, в соответствии с законом сохранения момента импульса удерживает волчок в положении отталкивающим полюсом вниз. Волчок испытывает силу трения только о воздух, вследствие чего он может парить довольно долго.
Более сложные варианты отличаются лишь тем, что используют тот или иной способ раскручивания предмета, который обычно заключён внутри небольшого глобуса. Тогда «левитация» длится, пока устройство не будет выключено или в нём не разрядятся батарейки. В нижней коробке дополнительно находится электромагнитная катушка-передатчик, а в верхнем предмете катушка-приёмник, которые совместно образуют воздушный трансформатор. Подобные устройства питания известны в виде беспроводных индукционных компьютерных мышей, где провод ведёт только к коврику. Передаваемой мощности может хватать даже на подсветку такого глобуса.
Другие устройства, основанные на принципе работы левитрона[править | править код]
Реализацией сувениров и игрушек такого типа занимается американская компания «Fascinations Toys and Gifts», расположенная в Сиэтле. К ним относятся: «Перпетуатор» (Perpetuator) — постоянно парящий левитрон, работающий от сети, к нему добавлены электромагнитные поля, поддерживающие вращение волчка, «Art Bank» — коробка, внутри которой в воздухе находятся модель самолёта, монетка или теннисный мячик, а также «Amazing Anti-Gravity Globes» — «летающий глобус». На основе таких игрушек начато производство рекламных промо левитронов с размещенными на них логотипами или атрибутикой компаний. В качестве волчка теперь возможно использовать самые различные предметы — телефоны, ювелирную продукцию и даже манекены с одеждой. Для таких промо левитронов устанавливаются магнитные усилители, выдерживающие до 3 килограммов веса. Изготовление рекламных промо левитронов началось в Китае, но с периодом импортозамещения теперь они производятся и в России.
Первый патент на левитрон, номер 4382245, был выдан в мае 1983 года Рою Хэрригену, американскому изобретателю (срок действия этого патента закончился в 2003).
Вильям Хонс и Эдвард Хонс получили несколько патентов на улучшения этого устройства: 5404062, 5883454 и др.
Самодельный левитрон («прототип нло») для очень сильных в физике и электронике. Как самому собрать аналоговый левитрон Змейка левитрон как работает
Здесь рассказано и показано, как сделать крутой левитрон своими руками!
Эту поделку меня вынудили собрать в универе:)
Делал я её в паре с одногруппником, задачей которого было сделать чумовой корпус, а с меня — электронную начинку.
Насколько всё классно получилось — судите сами, пишите комментарии, интересно будет почитать, обсудить.
Не помню, как именно мы пришли именно к идее сделать левитрон, тема поделки была вольная. Конструкция вроде и простая, но глаз притягивает.
Вообще сам левитрон — устройство, которое поддерживает какой-либо предмет в среде, которая никак не соприкасается с какой-либо поверхностью, кроме как через воздух. В вакууме тоже будет работать.
В данном случае электроника заставляет парить магнит, а магнит уже можно приклеить к, например, банке из-под вкусного недорогого напитка:)
Если хорошенько поискать в интернете, то можно увидеть много разных вариантов электромагнитного левитрона, например:
Их можно условно разделить на подвесной и отталкивающий. Если в первом случае необходимо просто компенсировать силу тяжести, то во втором ещё и смещение в горизонтальной плоскости, так как согласно теореме Ирншоу «всякая равновесная конфигурация точечных зарядов неустойчива, если на них кроме кулоновских сил притяжения и отталкивания ничто не действует.» — цитата из вики.
Из этого вытекает, что подвесной левитрон проще в изготовлении и настройке, если таковая вообще необходима. Сильно заморачиваться не хотелось, поэтому для универа сделали подвесной левитрон, о котором здесь идёт речь, а отталкивающий уже делал для себя любимого:) О нём в другой статье будет написано. Чуть позднее удалю этот текст и дам тут ссылку на него. Работает великолепно, но минусы свои тоже имеет.
В свою очередь все подвесные левитроны можно так же условно разделить на цифровые и аналоговые по способу удержания предмета на одном расстоянии. А по типу датчиков их можно разделить на оптические, электромагнитные, звуковые и, наверное, всё.
То есть сигнал о расстоянии магнита до левитрона мы получаем аналоговый, а корректируем силу воздействия на магнит уже цифровым способом. Hi-tech, однако.
Сама идея была позаимствована на сайте geektimes, а печатная плата была изготовлена уже персонально под наш набор деталей. Так же в исходном проекте были использованы трёхвыводные датчики SS49 , но сроки были весьма сжатые, у нас они стоили мягко говоря неоправданно дорого ($4 за штуку против $6 за 10 штук в китае — ссылка для примера), поэтому мы использовали четырёхвыводные датчики Холла. Пришлось изменить схему и внести конструктивные дополнения в устройство. Так же для большей понтовости был добавлен блок светодиодов, которые плавно загораются при поднесении магнита, то есть когда левитрон начинает работать и плавно выключаются, когда магнит убирают. Всё это будет отражено на схеме.
Собственно, схема левитрона на четырёхвыводных датчиках:

И схема левитрона на трёхвыводных датчиках и более простой подсветкой:

Принцип действия довольно прост. Катушка, являющаяся электромагнитом при подаче питания притягивает магнит — предмет притягивается. Датчик, прикреплённый между магнитом и катушкой фиксирует увеличение магнитного потока, что означает приближение магнита. Электроника это отслеживает и отключает катушку от источника напряжения. Магнит начинает падать под действием силы тяжести. Датчик фиксирует уменьшение магнитного потока, что сразу же обнаруживается электроникой и на электромагнит подаётся напряжение, магнит притягивается — и так происходит очень часто — около 100 тысяч раз в секунду. Возникает динамическое равновесие. Человеческий глаз не успевает заметить этого. Частота генератора задаётся резистором и конденсатором на выводах 5 и 6 микросхемы TL494.
Второй датчик на другой стороне электромагнита нужен для того, чтобы компенсировать магнитное поле, создаваемое самой катушкой. То есть, если бы не было этого второго датчика — при включении электромагнита система бы не могла отличить интенсивность магнитного поля неодимового магнита от магнитного поля, создаваемого самим электромагнитом.
Итак, мы имеем систему двух датчиков, сигнал с которых поступает на операционный усилитель в дифференциальном включении. Это значит, что на выходе операционного усилителя появляется лишь разность напряжений, получаемых с датчиков.
Для примера. На одном из датчиков на выходе напряжение 2,5 В, а на другом — 2,6 В. На выходе будет 0,1 В. Этот дифференциальный сигнал находится на выводе 14 микросхемы LM324 по схеме.
Далее этот сигнал поступает на два следующих операционных усилителя — OP1.1, OP 1.3, выходные сигналы которых через диодный вентиль идут на 4 вывод микросхемы TL494. Диодный вентиль на диодах D1, D2 пропускает только одно из напряжений — то, которое будет больше по номиналу. Вывод №4 ШИМ контроллера рулит следующим образом — чем выше напряжение на этом выводе — тем меньше скважность импульсов. Резистор R9 предназначен для того, чтобы в ситуации, когда на входах диодного вентиля напряжения меньше 0,6 В — вывод №4 был однозначно притянут к земле — при этом ШИМ будет выдавать максимально большую скважность.
Вернёмся к операционным усилителям OP1.1, OP 1.3. Первый служит для выключения ШИМ контроллера, пока магнит находится на достаточно большом расстоянии от датчика, чтобы катушка не работала на максимуме вхолостую.
С помощью OP 1.3 задаём коэффициент усиления дифференциального сигнала — по сути задаёт глубину обратной связи (ОС). Чем сильнее обратная связь — тем сильнее система будет реагировать на приближение магнита. Если глубина ОС не достаточна — магнит можно будет поднести вплотную, а прибор не начнёт снижать мощность, накачиваемую в электромагнит. А если глубина ОС будет слишком большая — то скважность начнёт падать до того, как сила притяжения магнита сможет его удерживать на этом расстоянии.
Переменный резистор P3 ставить не обязательно — он служит для настройки частоты генератора.
OP1.2 является генератором напряжения 2,5 В, необходимый для четырёхвыводных датчиков. Для трёхвыводных датчиков типа SS49 он не нужен.
Забыл упомянуть о элементах C1, R6 и R7. Их фишка в том, что постоянный сигнал здесь урезается в 10 раз за счёт резисторов, а переменный за счёт конденсатора спокойно проходит дальше, тем самым достигается упор работы схемы на резкие изменения расстояния магнита до датчика.
Диод SD1 предназначен для гашения обратных выбросов в момент отключения напряжения на электромагните.
Узел на T2 позволяет плавно включать и выключать светодиодную линейку при появлении импульсов на электромагните.
Перейдём к конструктивному исполнению.
Одним из ключевых моментов в левитроне является электромагнит. Мы делали каркас на основе какого-то строительного болта, на котором были вырезаны круглые бортики из фанеры.

Магнитный поток здесь зависит от нескольких ключевых факторов:
- наличие сердечника;
- геометрия катушки;
- ток в катушке
Если проще, то чем больше катушка и
Платформенный левитрон своими руками
Приветствую, Самоделкины!Сегодня мы вместе с Романом, автором YouTube канала «Open Frime TV», соберем платформенный левитрон.


История создания данного устройства началась еще в далеком 2016 году. Тогда автор наткнулся на статью «МозгоЧинов», и всей душой загорелся повторить данное устройство.

Но не все так легко. Собрать именно такой вариант у автора не было возможности. Тогда он стал искать альтернативу и нашел такую на «РадиоКоте».

Скачал печатку, начал травить, а потом собирать устройство.


Но в конце концов все обломалось. Спустя полгода, может чуть больше, автор стал осваивать Ардуино. И ему в голову пришла идея сделать левитрон на ней. С новыми силами он бросился в бой, но опять разочарование. Много бессонных ночей в написании кода, и сборке прошли зря. Левитирующий магнит все никак не хотел зависать, его дергало из стороны в сторону и все тут.

Спустя еще какое-то время автор наткнулся на очередную статью с полным описанием, заказал комплектующие, начал собирать, намотал новые катушки, запустил все и снова неудача. Автор начал думать, почему же левитрон не запускается и понял в чем проблема. Оказалось, что все намотанные катушки имели внутри металлическое основание, и сила с которой магнит тянулся к сердечнику превышала противодействие. Из-за этого и происходила такая лажа. В итоге автор перемотал катушки и свершилось чудо — магнит полетел.
Радости не было предела. Автор любовался своей самоделкой целый вечер. Ну это была так, предыстория, ну а теперь приступаем непосредственно к сборке. Для начала давайте ознакомимся с устройством.

Итак, в основании у нас лежат постоянные магниты, которые создают магнитное поле в виде купола. На самой его вершине находится точка равновесия, в этой точке магниты основания как бы выталкивают левитирующий магнит вверх, компенсируя силу тяжести. Но есть одно «но», эта точка крайне нестабильна, и левитирующий магнит постоянно слетает с нее.


Тут нам на помощь приходят электромагниты и датчики Холла, которые отслеживают положение магнита и как только он начинает улетать с точки, включается соответствующий электромагнит и подтягивает левитирующий магнит обратно в центр. Таким образом он совершает колебания в разные стороны, но с большой частотой, и глаз этого практически не видит.
Отлично, разобрались с теорией, переходим к практике. Мозгом схемы будет Arduino Uno.

Сперва автор хотел использовать Arduino Nano, но нечаянно спалил ее, подав не то напряжение. Силовая часть схемы — это драйвер шагового двигателя L298N.

Ну и следящая часть — это 2 датчика Холла, расположенных в центре конструкции.

Теперь давайте рассмотрим схему устройства, начнем, пожалуй, с блок схемы.

На схеме видно, что с чем соединено, теперь рассмотрим каждый блок по отдельности. Датчики Холла снабжены дополнительным усилителем на микросхеме LM324. Усиленный сигнал с Холлов поступает на аналоговый вход Ардуинки.


Следующий блок — это драйвер и катушечки. Про их намотку чуть позже, а сейчас чисто схема.

Как видим, подключается все элементарно и без особых проблем.
Теперь переходим к сборке. В качестве основания будем использовать макетную плату. Ее нужно немного уменьшить и просверлить отверстия. Расстояния между отверстиями 40мм.


После подготовки макетки займемся намоткой катушек. Как уже говорилось ранее, именно в катушках и была проблема, так как все они были с металлическим сердечником. В качестве основания возьмем колпачок для иголки шприца. Сами ограничители для катушек сделаны, как и в первых вариантах, из текстолита.

Размер катушек перед вами.

Все они мотаются в одну сторону. Количество витков 350, диаметр провода 0.44 мм. Думаю, если вносить 10, а то и 20 процентные изменение в параметры обмоток, результат не изменится.
Когда катушки готовы, устанавливаем их на плату, как и остальные части. Теперь необходимо соединить катушки по 2 штуки последовательно, таким образом, чтобы при подаче напряжения на пару катушек, одна из них притягивала, а вторая в этот момент отталкивала.

По поводу расположение датчиков Холла. Они должны быть строго на оси своих катушек. То куда они развернуты роли не играет, все будет корректироваться в настройке.

Следующий шаг — соединение всех элементов в одну цепь и прошивка Ардуино. Сам скетч и все картинки со схемами найдете в архиве проекта.

А вот после прошивки начинаются сложности. Для настройки постоянные магниты в основание ставить нельзя. Когда залили скетч в Ардуино, берем магнит, который должен левитировать и располагаем над катушками, водя рукой над тем местом где должна быть точка левитации, мы должны почувствовать сопротивление катушек.

Вот допустим, мы ведем влево, значит катушки срабатывают и тянут вправо, если тяга идет не в ту сторону, то нужно поменять местами выводы катушек на драйвере.

Теперь настало время установить магниты на плату. Магниты должны быть неодимовыми.


Вообще можно использовать и прямоугольные магниты в основании, но автор решил взять круглые, так как они дешевле и имеют отверстие для крепления. Магниты устанавливаем в пространства между катушками. Расстояние между ними по диагонали равно 5,5 см.

Теперь берем магнит, который будем подвешивать и пытаемся его расположить в центре левитации. Тут важно угадать с весом магнита. Автор делал так, брал основной магнит и на него вешал мелкие, таким образом нашел равновесие. Но магнит в центре висел не долго, его постоянно сносило в одну сторону. Тут на помощь к нам приходят подстроечные резисторы, вращая их можно смещать точку равновесия. Таким образом мы выравниваем парящий магнит.


Все, настройка завершена. Осталось все это красиво оформить в корпус. Для этого подойдет вот такой короб.

Но, как оказалось, у него очень толстые стенки, а у нас каждый миллиметр буквально на вес золота. Поэтому необходимо вырезать в крышке отверстие под катушки, и закрепить их заподлицо с корпусом.

Получившееся отверстие в корпусе нужно было чем-то накрыть. И тут отлично подошла еще одна макетная плата, получилось ну очень даже здорово.
В корпусе расположили драйвер и Ардуинку, а питание возьмем от внешнего адаптера на 12В, 2А. В итоге конструкция стала похожа на заводскую модель. На нее можно установить какую-нибудь декоративную штуку типа самолетика или машинки, и наслаждаться.

На этом все. Благодарю за внимание. До новых встреч!
Видео:
Источник
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Как самому собрать аналоговый левитрон / Habr
0.Предисловие
Начитался тут всяких интернетов и решил сваять свой собственный левитрон, без всяких цифровых глупостей. Сказано – сделано. Выкладываю муки творчества на всеобщее обозрение.
1.Краткое описание
Левитрон – это устройство, удерживающее объект в равновесии с силами гравитации с помощью магнитного поля. Давно известно, что невозможно левитировать объект, используя статичные магнитные поля. В школьной физике это называлось состоянием неустойчивого равновесия, насколько я помню. Однако, затратив немного желания, знаний, усилий, денег и времени, возможно левитировать объект динамически путем использования электроники в качестве обратной связи.
Получилось вот что:
2.Фунциональная схема
Электро-магнитные датчики, расположенные на торцах катушки, выдают напряжение, пропорциональное уровню магнитной индукции. В случае отсутствия внешнего магнитного поля эти напряжения будут одинаковы вне зависимости от величины тока катушки.
При наличии постоянного магнита вблизи нижнего датчика блок управления будет формировать сигнал, пропорциональный полю магнита, усиливать его до нужного уровня и передавать на ШИМ для управления током через катушку. Таким образом, возникает обратная связь и катушка будет генерировать такое магнитное поле, которое будет удерживать магнит в равновесии с силами гравитации.
Что-то заумно все получилось, попробую по другому:
— Нет никакого магнита — индукция на торцах катушки одинакова — сигнал с датчиков одинаков — блок управления выдает минимальный сигнал — катушка работает на всю мощь;
— Близко поднесли магнит — индукция сильно разная — сигналы от датчиков сильно разные — блок управления выдает максимальный сигнал — катушка отключается совсем — магнит никто не держит и он начинает падать;
— Манит падает — отдаляется от катушки — разница сигналов с датчиков уменьшается — блок управления уменьшает выходной сигнал — ток через катушку увеличивается — увеличивается индукция катушки — магнит начинает притягиваться;
— Манит притягивается — приближается к катушке — разница сигналов с датчиков увеличивается — блок управления увеличивает выходной сигнал — ток через катушку уменьшается — уменьшается индукция катушки — магнит начинает падать;
— Чудо — магнит не падает и не притягивается — вернее, и падает и притягивается несколько тысяч раз в секунду — то есть возникает динамическое равновесие — магнит просто висит в воздухе.
3.Конструкция
Главным элементом конструкции является электро-магнитная катушка (соленоид), которая и удерживает своим полем постоянный магнит.
На пластиковый каркас D36x48 плотно намотано 78 метров медного эмалированного провода диаметром 0.6 мм, получилось где-то 600 витков. По расчетам, при сопротивлении 4.8Ом и питании 12В, ток будет 2.5А, мощность 30Вт. Это необходимо для подбора внешнего блока питания. (По факту получилось 6.0Ом, вряд ли нарезали больше провода, скорее сэкономили на диаметре.)
Внутрь катушки вставлен стальной сердечник от дверной петли диаметром 20мм. На его торцах с помощью термоклея закреплены датчики, которые обязательно должны быть ориентированы в одинаковом направлении.
Катушка с датчиками закреплена на кронштейне из алюминиевой полосы, который, в свою очередь, крепится к корпусу, внутри которого находится плата управления.
На корпусе расположен светодиод, выключатель и гнездо питания.
Внешний блок питания (GA-1040U) взят с запасом по мощности и обеспечивает ток до 3.2А при 12В.
В качестве левтитрующего объекта используется N35H магнит D15x5 с приклеенной банкой из под кока-колы. Сразу скажу, что полная банка не годится, поэтому тонким сверлом делаем отверстия по торцам, сливаем ценный напиток (можно выпить если не боитесь стружки) и к верхнему колечку клеим магнит.
4.Принципиальная схема
Сигналы с датчиков U1 и U2 подаются на операционный усилитель OP1/4, включенный по дифференциальной схеме. Верхний датчик U1 подключен к инвертирующему входу, нижний U2 – к неинвертирующему, то есть сигналы вычитаются, и на выходе OP1/4 получаем напряжение, пропорциональное только уровню магнитной индукции, создаваемому постоянным магнитом вблизи нижнего датчика U2.
Комбинация элементов C1,R6 и R7 является изюминкой данной схемы и позволяет достичь эффекта полной стабильности, магнит будет висеть как вкопанный. Как это работает? Постоянная составляющая сигнала проходит через делитель R6R7 и ослабляется в 11 раз. Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Далее, подготовленный сигнал усиливается на OP1/3. С помощью переменного резистора P2 устанавливается необходимый коэффициент усиления на этапе настройки для достижения равновесия в зависимости от конкретных параметров магнита и катушки.
На OP1/1 собран простой компаратор, который отключает ШИМ и, соответственно, катушку, когда рядом нет магнита. Очень удобная вещь, не надо вынимать блок питания из розетки если убрали магнит. Уровень срабатывания задается переменным резистором P1.
Далее, управляющий сигнал подается на широтно-импульсный модулятор U3. Размах выходного напряжения 12В, частота выходных импульсов задается номиналами C2,R10 и P3, а скважность зависит от уровня входного сигнала на входе DTC.
ШИМ управляет переключением силового транзистора T1, а тот, в свою очередь, током через катушку.
Светодиод LED1 можно и не ставить, а вот диод SD1 нужен обязятельно, для слива лишнего тока и избежания перенапряжения в моменты выключения катушки из-за явления самоиндукции.
NL1 – это наша самодельная катушка, коей посвящен отдельный раздел.
В результате, в режиме равновесия, картина будет примерно такая: U1_OUT=2.9V, U2_OUT=3.6V, OP1/4_OUT=0.7V, U3_IN=1.8V, T1_OPEN=25%, NL1_CURR=0.5A.
Для наглядности прикладываю графики передаточной характеристики, АЧХ и ФЧХ, и осциллогаммы на выходе ШИМ и катушки.
5.Выбор компонентов
Устройство собрано из недорогих и доступных компонентов. Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.
В качестве датчиков магнитного поля U1 и U2 используются аналоговые датчики Холла SS496A с линейной характеристикой вплоть до 840Гс, это самое то для нашего случая. При использовании аналогов с другой чувствительностью потребуется корректировка коэффициента усиления на OP1/3, а также проверка на уровень максимальной индукции на торцах вашей катушки (в нашем случае с сердечником она достигает 500Гс), чтобы датчики не входили в насыщение при пиковой нагрузке.
OP1 -это счетверенный операционный усилитель LM324N. При выключенной катушке выдает 20мВ вместо нуля на 14 выходе, но это вполне приемлемо. Главное не забыть выбрать из кучки 100К резисторов наиболее близкие по фактическому номиналу для установки в качестве R1,R2,R3,R4.
Номиналы C1,R6 и R7 выбраны путем проб и ошибок как самый оптимальный вариант для стабилизации магнитов разных калибров (тестировались N35H магниты D27x8, D15x5 и D12x3). Соотношение R6/R7 можно оставить как есть, а номинал C1 увеличивать до 2-5мкФ, в случае возникновения проблем.
При использовании очень маленьких магнитов, вам возможно будет не хватать коэффициента усиления, в этом случае урежьте номинал R8 до 500Ом.
D1 и D2 это обычные выпрямительные диоды 1N4001, тут подойдут любые.
В качестве широтно-импульсного модулятора U3 используется распространенная микросхема TL494CN. Частота работы задается элементами C2, R10 и P3 (по схеме 20кГц). Оптимальный диапазон 20-30кГц, при меньшей частоте появляется свист катушки. Вместо R10 и P3 можно просто поставить резистор 5.6K.
T1 это полевой транзистор IRFZ44N, подойдет и любой другой из этой же серии. При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
SD1 это диод шоттки VS-25CTQ045, тут я хватанул с большим запасом, подойдет и обычный быстродействующий диод, но, возможно, будет сильно греться.
LED1 желтый светодиод L-63YT, здесь, как говорится, на вкус и цвет, можно их и побольше наставить, чтобы все светилось разноцветными огнями.
U4 это стабилизатор напряжения 5В L78L05ACZ для питания датчиков и операционного усилителя. При использовании внешнего блока питания с дополнительным выходом 5В, можно обойись и без него, но конденсаторы лучше оставить.
6.Заключение
Все получилось как задумано. Устройство стабильно работает круглые сутки, потребляет всего 6Вт. Ни диод, ни катушка, ни транзистор не греются. Прикладываю еще пару фоток и финальное видео:
7. Дисклаймер
Я не электронщик и не писатель, просто решил поделиться опытом. Может что-то покажется вам слишком очевидным, а что-то слишком сложным, а о чем-то забыл упомянуть вообще. Не стесняйтесь вносить конструктивные предложения и по тексту и по улучшению схемы, чтобы люди могли запросто это повторить, если будет такое желание.
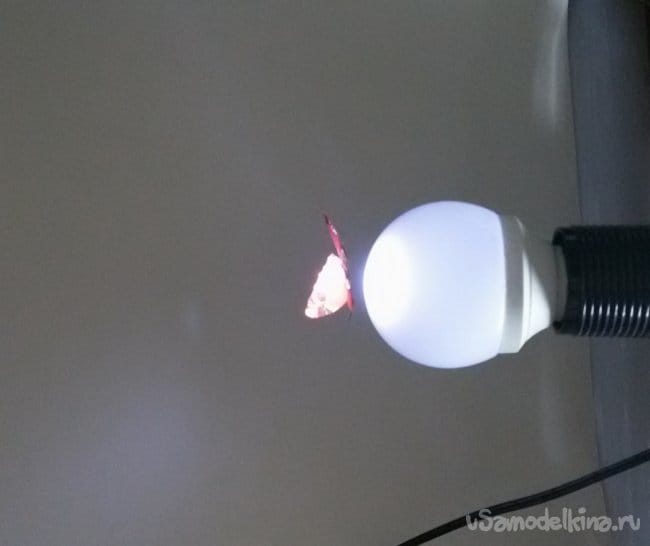
Светодиодная лампа – левитрон

Близятся новогодние праздники. А как прийти в Новый год без подарка, к родным, близким и друзьям. И в тоже время, еще не потеряла актуальности старая присказка, что лучший подарок – это подарок сделанный своими руками. А почему бы и нет, давайте попробуем сделать кому-либо оригинальный новогодний подарок.
В качестве такого подарка предлагается изготовить простейший левитрон. Магнитная левитация всегда выглядит впечатляюще и завораживающе. С помощью невидимой электромагнитной силы поднимем и удержим в воздухе небольшой неодимовый магнит. Создание парящего эффекта осуществляется поднятием и опусканием магнита в очень небольшом диапазоне высот, но с высокой частотой. Такое устройство сегодня можно сделать самому. И для этого не обязательно тратить много денег и времени.
В данной статье рассмотрим схему и технологию изготовления магнитного левитрона из простых и дешевых компонентов.
Схема устройства для магнитной левитации представлена ниже.

Принцип работы устройства
С помощью данной схемы, катушка L1 создает определенное электромагнитное поле, которое удерживает на весу постоянный магнит. Так как равновесное положение крайне не стабильно, для удержания магнита в схеме используется система автоматического контроля и управления. Датчиком контроля положения, служит магнитоуправляемый датчик MD1, на основе эффекта Холла. Он расположен и закреплен в центре катушки, со стороны рабочего торца.
Работа датчика Холла (MD1) заключается в понижении выходного сигнала (выв.3), вплоть до отключения, при нарастании статического или динамического магнитного поля. При понижении магнитного поля, все наоборот. Датчик Холла работает при небольшом напряжении питания (4…20 V) и малом токе (3…20 mA), управляя при этом силовым транзистором VT1.
Светодиод LED1 служит для визуального контроля над работой устройства.
Диод VD2 обеспечивает быстродействие работы катушки.
Схема работает следующим образом.
При включении устройства, ток проходит через катушку L1 и открытый транзистор VT1.
При этом катушка создает магнитное поле и начинает притягивать постоянный магнит. Магнит притягивается к электромагниту, но поднимаясь, он попадает в зону действия датчика положения (МD1) и своим магнитным полем переключает его. При этом подается сигнал на транзистор VT1, который отключает электромагнит. Тогда постоянный магнит начинает падать, но выйдя из зоны чувствительности датчика, вновь включает электромагнит. При этом магнит вновь вынужден двигаться к электромагниту. Таким образом, постоянный магнит непрерывно колеблется около определенной системой точки.
Для того, чтобы постоянный магнит в процессе колебаний не перевернулся, его положение стабилизируют, например, закрепив к нему что либо снизу. При перевороте магнита, меняется его полюс, обращенный к датчику положения МD1 и схема перестает работать, так как датчик управляется только южным полюсом магнита.
Изготовление устройства
1. Основу устройства левитрона определяет катушка электромагнита. Ее выбор будет во многом определять конструкцию устройства.
Катушку можно изготовить самостоятельно. Достаточно намотать на трубку 500…600 витков эмалированного провода диаметром 0,3…0,4 мм (потребуется около 20 метров провода). Для питания такого устройства можно использовать блок питания или зарядное устройство на напряжение 5 — 9 вольт.
Возможен вариант использования имеющейся промышленной катушки. При этом желательно знать ее номинальное напряжение питания и подобрать в дальнейшем соответствующий источник питания.
В нашем случае, для оригинального подарка, требуется компактное исполнение устройства, поэтому была выбрана катушка малогабаритного реле.

2. Кроме катушки нам потребуется полевой транзистор, например, IRFZ44N или другой подобный MOSFET, опять же в зависимости от параметров применяемой катушки. В нашем случае задействован транзистор IRF630, оставшийся на кусочке платы, после утилизации видеоаппаратуры.
Также нужен датчик Холла, например, типа A3144, Ah543 или другой, работающий на аналогичных режимах. В данном случае использован дешевый датчик, найденный в магазине, модели HAL 508 UA-A-2-B-1-00.
Доукомплектуем устройство остальными покупными радиодеталями согласно приведенной схеме.
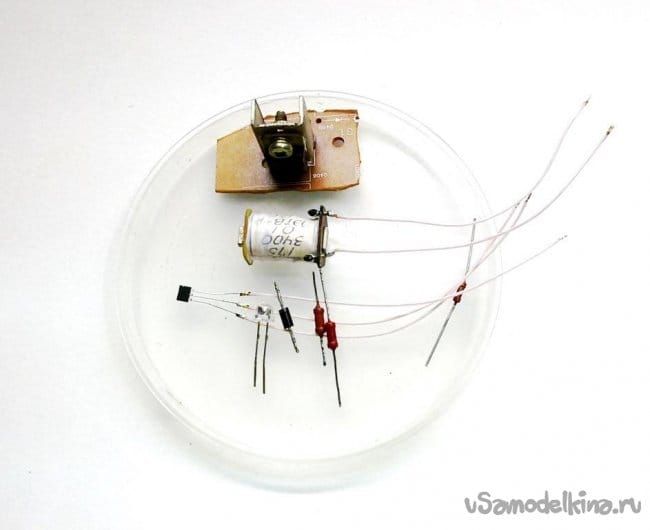
3. Для проверки и настройки работы левитрона, собираем левую часть вышеприведенной схемы, за исключением резистора R2 и с изменением номинала R3 на 330 Ом. Правая часть схемы представляет собой источник питания устройства, и в этом варианте она не нужна. Сборку и отработку схемы удобнее выполнить на универсальной монтажной плате, но так как имеющийся транзистор уже был впаян вместе с радиатором на кусочке платы, подходящего размера, распаял схему рядом с ним.

4. Собираем катушку. Датчик Холла помещаем и временно закрепляем по центру отверстия, в самом низу катушки.

5. Испытание устройства. Зафиксируем катушку на некотором расстоянии от поверхности стола. После этого на устройство магнитной левитации можно подать питание. Так как катушка указанного ранее реле имеет сопротивление обмотки 210 Ом и рассчитана на постоянный ток напряжением 12В, подключаем ее к соответствующему источнику питания.
Затем необходимо определить, какой стороной ориентировать к электромагниту постоянный неодимовый магнит. Включаем левитрон (должен загореться светодиод) и подносим магнит к низу катушки, со стороны датчика Холла. Если магнит притягивается к катушке и светодиод при этом гаснет — то магнит ориентирован правильно, но если магнитное поле катушки выталкивает его, то магнит необходимо перевернуть. Если светодиод не гаснет, при подводе магнита любой стороной, необходимо поменять местами концы катушки, т.е. сменить ее полюса. Когда все сделано правильно, электромагнитная сила подхватит магнит и будет удерживать его в воздухе. Не забываем стабилизировать положение магнита, чтобы он в процессе колебаний не перевернулся. В данном случае использовался кольцевой неодимовый магнит диаметром 7 мм и толщиной 1 мм, взятый из микро наушника. Для его стабилизации достаточно кусочка изоленты приклеенного с одной стороны магнита.
Примечание. Первые испытания с этой катушкой прошли не удачно. Сердечник катушки реле усиливал магнитное поле, но и оказывал свое влияние при отключении катушки. В процессе наладки, положение магнита было не стабильно или магнит притягивался к сердечнику при выключенной катушке. При удалении сердечника из катушки процесс стабилизировался, что видно на фото.
6. Модернизация устройства. Дальнейшие испытания показали некоторые недостатки. Во-первых, необходимость дополнительного источника питания, что увеличивает сложность и размеры и не добавляет оригинальности подарку. Во-вторых, при увеличении дальности полета (расстоянии от катушки), нужно увеличивать напряжение питания, а это ведет к нежелательному нагреву катушки.
Возможно, конечно, остановиться и на этом варианте, используя полученные возможности. Осталось всего лишь «упаковать» устройство в достойный корпус.
7. Можно изготовить второй вариант устройства, заменив катушку на более высоковольтную (но с меньшим током потребления) и изготовить дополнительно встроенный бестрансформаторный блок питания. Полная схема этого устройства приведена в начале статьи.
Второй вариант катушки от импортного реле рассчитан на напряжение 110 вольт и имеет сопротивление обмотки 4700 Ом. Комплектуем устройство деталями согласно схеме.


8. Изготовим бестрансформаторный блок питания (правая часть схемы). Он преобразует переменный ток 220 вольт в нужное нам напряжение — около 100 вольт (определяется стабилитроном VD3) постоянного тока небольшой величины (определяется емкостью конденсатора С3 типа К73-17). Такой БП имеет преимущества – простая схема и малые габариты. Но имеет и недостаток – присутствует опасность поражения электрическим током при контакте с деталями на включенном устройстве. Однако при соблюдении правил техники безопасности, отсутствие гальванической развязки в полностью изолированном устройстве будет безопасным.
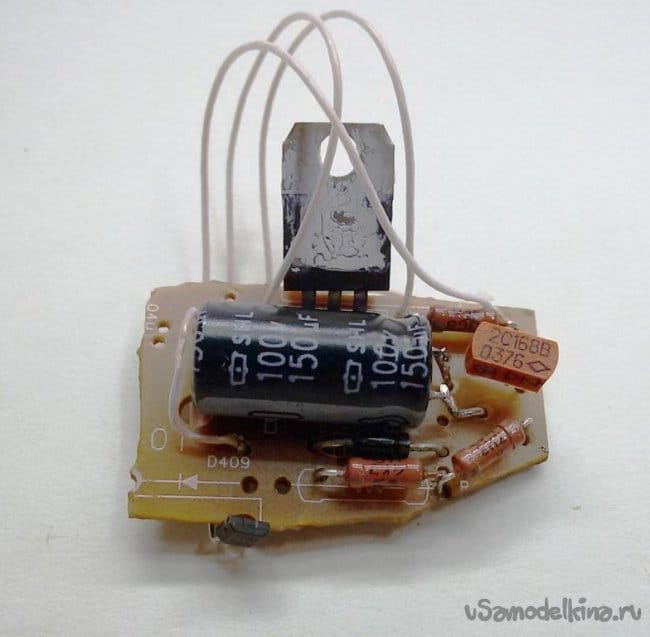
9. В качестве корпуса для левитрона используем сопрягаемые по размерам, патрон от сгоревшей люминесцентной энергосберегающей лампы и светорассеивающий плафон от светодиодной лампы. Разместим и сформируем схему на плате по внутренним размерам патрона, припаяем плату к выводам патрона.



Так как сглаживающий конденсатор С2 не входит в патрон, установим его на плату левитрона. Также уберем радиатор транзистора, так как при малой мощности нагрузки он необязателен.
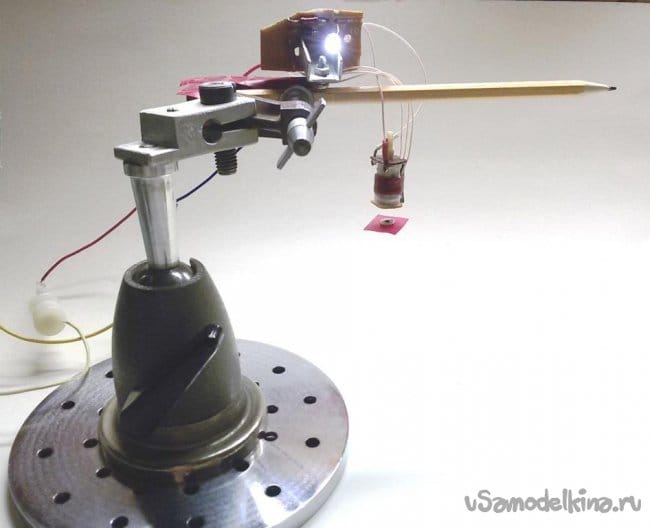
10. Соберем устройство на стенде и испытаем.


В данном случае использовался кольцевой неодимовый магнит диаметром 10 мм и толщиной 3 мм. Датчик MD1 установим по центру катушки и предварительно зафиксируем кусочком поролона. Перемещая датчик Холла, добиваемся стабильного зависания магнита на максимальном расстоянии от катушки. Закрепляем положение датчика относительно катушки.
11. После настройки левитрона собираем и склеиваем устройство. Для придания устройству большего эффекта светодиодной лампы, можно добавить внутрь плафона 2-3 постоянно включенных светодиода с ограничительными резисторами. Для обеспечения теплоотвода, предусмотреть в патроне вентиляционные отверстия, если они не были предусмотрены конструкцией бывшей лампы.



Для создания заворачивающего парящего эффекта, магнит можно завуалировать какой либо легкой фигуркой, например, контуром мотылька.

 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Волчок-левитрон или магнитная левитация своими руками
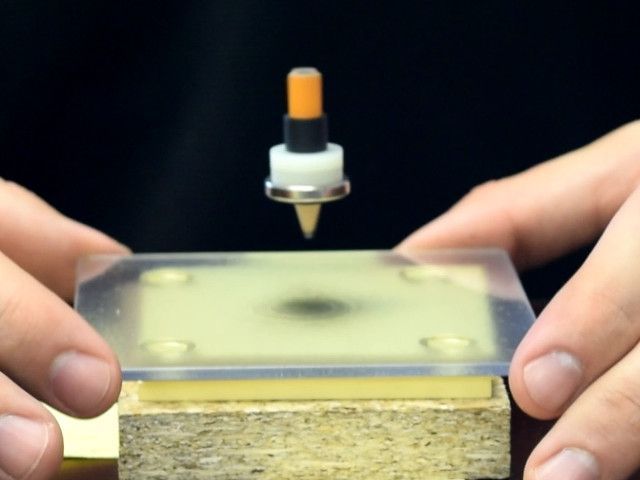
Помните популярную игрушку из 90-х «Левитрон»? Это волчок, который висит в воздухе за счет магнитных сил. Попробуем сделать сами такую игрушку из подручных материалов и понаблюдаем за магнитной левитацией.
Нам потребуются следующие материалы:
- Деревянная доска, карандаш, изоляционная лента, пластиковые или латунные шайбы, почтовые бумажные, пластиковые или картонные открытки.
- Тринадцать дисковых неодимовых магнитов размерами 12*3 мм, марки N52; один широкий кольцевой размерами 20 (наружный диаметр) * 10 (внутренний диаметр) мм, марки N42.
Шаг 1: Раскладка

В игрушке «Левитрон», которая была популярна в 90-х годах, и которая больше не продается (или продается?), использовались два специальных керамических кольцевых магнита. Мы же с вами сделаем игрушку, используя несколько стандартных неодимовых магнитов.
Как сделать левитрон с подставкой своими руками? В первую очередь, распечатайте на принтере макет, изображенный выше. Он нужен для разметки отверстий под установку магнитов. Обязательно проверьте размеры с помощью линейки. Затем вырежьте макет по квадратной разметке.
Шаг 2: Вырезаем деревянное основание

Вырежьте деревянную заготовку такого же размера, как и бумажный макет. Вы можете использовать для изготовления основания любой пиломатериал, но его толщина должна быть не менее 6 мм.
Шаг 3: Переносим макет на основание

Далее приклейте бумажный макет к деревянному блоку. С помощью сверла Форстнера диаметром 12 мм накерните центр в каждом круге. Это необходимо для последующего точного сверления отверстий.
Шаг 4: Сверлим отверстия

Пришло время сверлить отверстия. Чтобы получились качественные отверстия с плоским дном, для сверления используйте сверло Форстнера диаметром 12 мм. Установите на сверлильном станке глубину сверления так, чтобы дно отверстия находилось чуть ниже верхней поверхности блока. Нужно, чтобы магниты располагались как можно ближе к поверхности.
Во время сверления макет должен оставаться наклеенным на деревянный блок, чтобы сверление было более точным.
Шаг 5: Устанавливаем магниты
Отверстия просверлены. Пора вставлять магниты. Они должны быть обращены одним из полюсов вверх. Установим их северным полюсом вниз. Чтобы определить, где северная, а где южная стороны, используйте маркированный магнит D68PC-RB или другой способ.
Возьмите стопку марки N52 и вставьте по одному в каждое отверстие. Используйте что-нибудь для проталкивания их вглубь отверстий. Можете воспользоваться деревянным дюбелем.
Во время установки, поместите блок на стальную пластину, чтобы магниты удерживались на дне отверстий.
Убедитесь, что магниты располагаются как можно глубже в отверстиях Левитатора.
Шаг 6: Делаем волчок

Далее делаем волчок. Отрежьте карандаш длиной примерно 40 мм. У него должен быть заострен конец. Намотайте на карандаш изоленту, чтобы увеличить диаметр для установки внутрь кольцевого магнита.
Разместите кольцевой магнит на карандаше так, чтобы северный полюс был обращен вниз (в сторону острого конца карандаша). Для увеличения веса волчка, наденьте на него несколько пластмассовых шайб.
В последствии вам придется экспериментировать с весом и высотой центра тяжести волчка, чтобы он работал так, как надо. Для этого может потребоваться очень много времени.
Шаг 7: Тестируем

Отрежьте кусок пластика или картона, чтобы сделать платформу. Платформа укладывается поверх основания с магнитами. Волчок раскручивается на этой платформе, затем платформа с волчком поднимается, чтобы волчок попал в «магнитную яму».
Если вы сможете заставить волчок висеть, то вам крупно повезло. Чтобы волчок работал как следует, вам, возможно, придется потратить на это уйму времени.
Вот несколько советов, как можно отрегулировать работу устройства. Во-первых, нужно сбалансировать основание. Используйте картонные открытки или листки бумаги для заметок, чтобы поднять стороны основания и выровнять его.
Если волчок продолжает отклоняться в одну сторону, вам нужно будет поднять эту сторону. Здесь лучше использовать трехточечную систему нивелирования.
Вес волчка также является ключевым фактором. В устройстве есть некая «яма», то есть зона, магнитное поле в центре которой немного слабее, чем у краев. Чтобы волчок оставался в этой яме, вам нужно либо добавить ему вес, либо снизить его.
Если волчок сразу вылетает, то вам, вероятно, нужно добавить ему веса. Если волчок не отрывается от платформы, возможно, он слишком тяжелый.
Также нужно убедиться, что высота платформы выбрана правильно. Если волчок плохо вращается, попробуйте подложить бумажки или картонки под платформу.
Посмотрите видео, чтобы узнать, как это работает!
Шаг 8: Печать на 3D-принтере
Если у вас есть 3D-принтер, то распечатайте игрушку на нем. Вот ссылка на файлы в ThingiVerse.
Если желаете, можете прочитать статью о том, как работает левитирующий волчок.